
HARDWARE / SPRZĘT
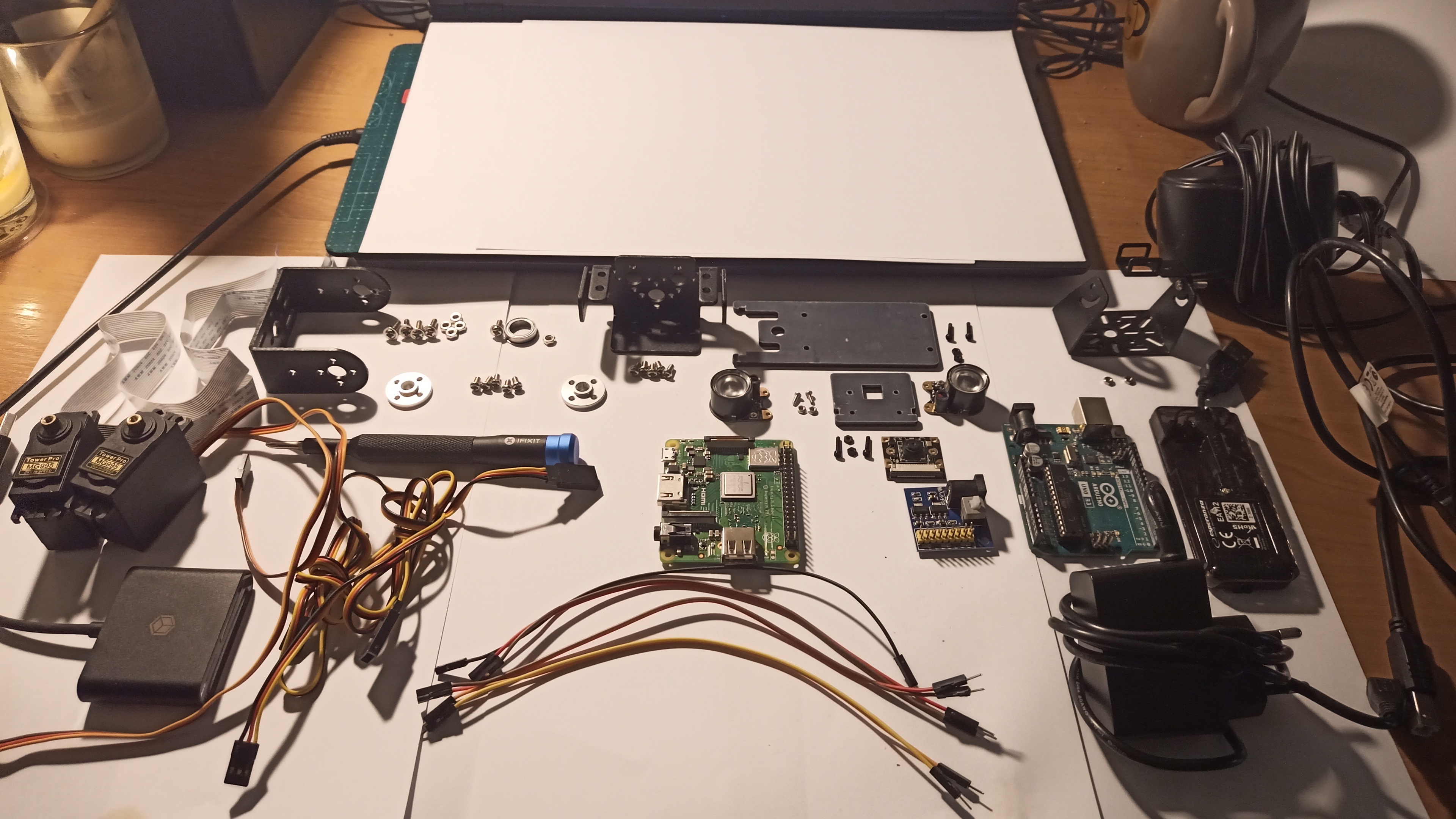
1) Potrzebne komponenty: 2x serwomechanizm TowerPro MG995, aluminiowe mocowanie Pan/Tilt Kit standard (część dolna i górna), 2x aluminiowy okrągły orczyk, 1x aluminiowa obręcz, 2x przedłużacz do serw, mocowanie kamery RPI, kamera HD Night Vision E OV5647 5Mpx z reflektorami IR, taśma CSI 60cm, moduł zasilający 5V, Raspberry Pi 3 A+, Arduino Uno (lub Nano), zasilacz 9V, zasilacz 5V, kabel USB A <> USB B, hub USB, okablowanie, śruby, nakrętki.
Dokładna lista oraz namiary na wszystkie użyte poniżej przykładowe komponenty wraz z linkami znajdują się w dokumentacji. Do budowy konstrukcji można użyć dowolnych materiałów i serwomechanizmów o dowolnej mocy, niżej przedstawiony projekt jest jedynie przykładowy.
Dokładna lista oraz namiary na wszystkie użyte poniżej przykładowe komponenty wraz z linkami znajdują się w dokumentacji. Do budowy konstrukcji można użyć dowolnych materiałów i serwomechanizmów o dowolnej mocy, niżej przedstawiony projekt jest jedynie przykładowy.
2) Przed przystąpieniem do montażu serw należy ustawić je w środkowej pozycji (mechanizm obrócony o 90 stopni w przypadku serw 180 stopni). Podłącz kable zasilające serw (+5V i GND) do modułu zasilającego.
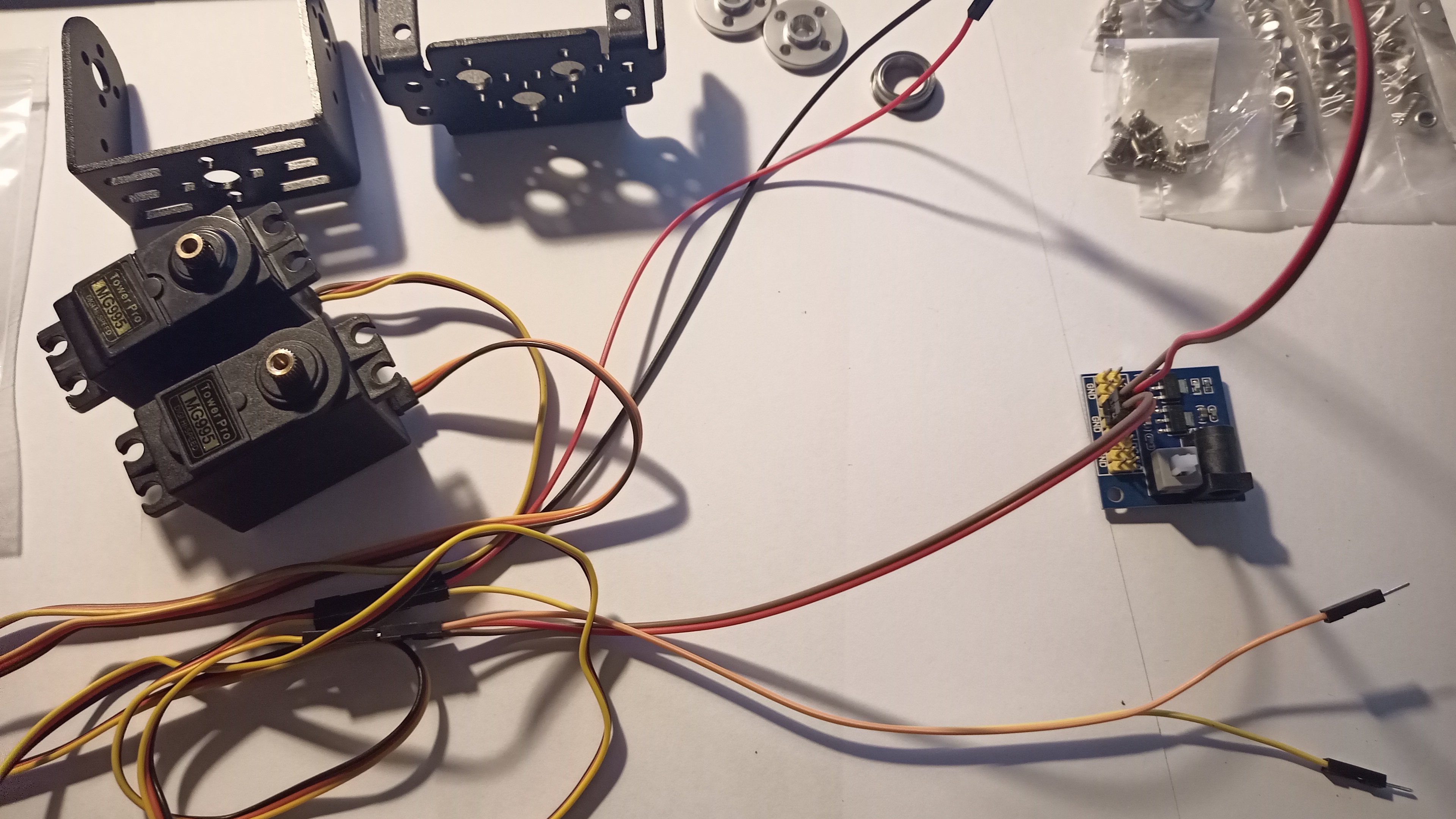
3) Do pinu GND na Arduino (może to być dowolny model - np. Uno lub Nano) podłącz przewód z masą (czarny kabelek na zdjęciu), drugi koniec przewodu podłącz do pinu GND modułu zasilającego - Arduino i płytka zasilająca serwa muszą być podłączone do wspólnej masy. Na Arduino wgraj za pomocą Arduino IDE kod C++ z dostępnego w sekcji Download oprogramowania (będzie dostępne w katalogu "Client / Arduino"). Po wgraniu kodu na Arduino podłącz do niego przewody sterujące (PWM) od serw. Żótły kabel (na zdjęciu) podłącz do pinu 10 na Arduino, pomarańczowy (na zdjęciu) podłącz do pinu 11. Piny 10 i 11 na Arduino mogą generować sygnał PWM do sterowania serwami. Mając Arduino podłączone do prądu (np. do portu USB) naciśnij na jego płytce przycisk RESET. Wgrany na płytkę kod po zresetowaniu płytki ustawi oba serwa w domyślnej pozycji 90 stopni. Dla wygody przewody od serw możesz podłączyć przez kable przedłużające.
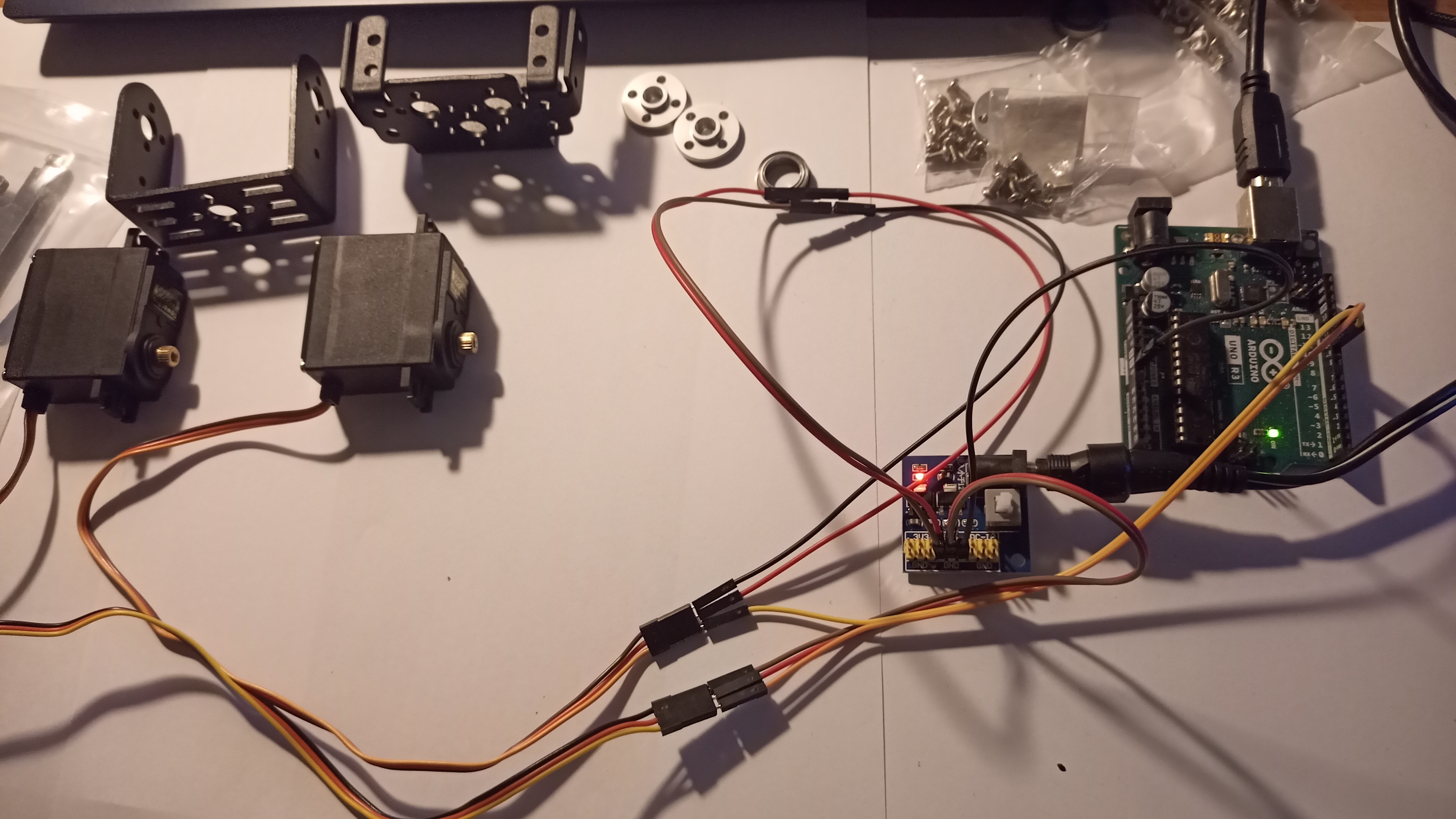
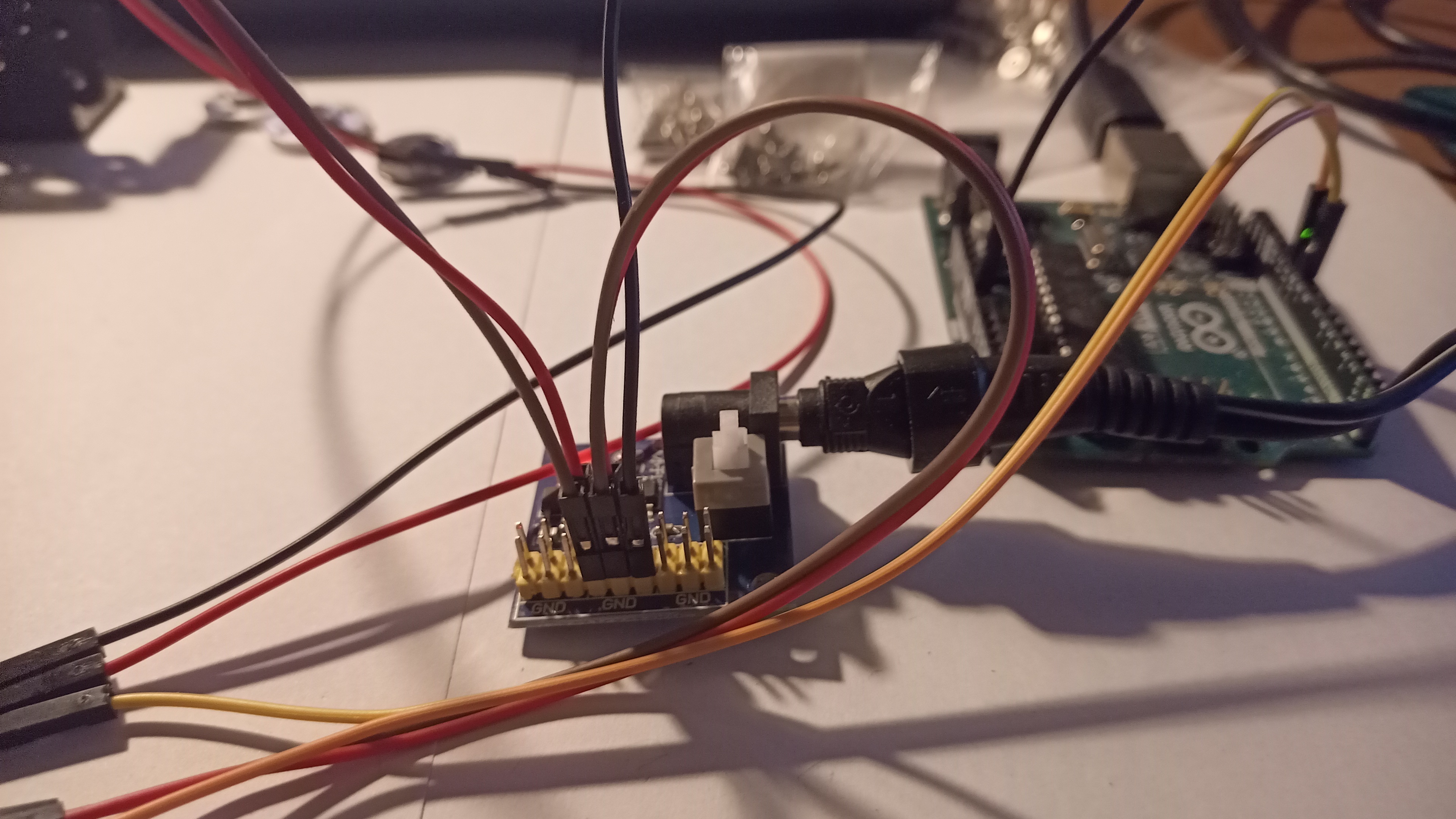
4) Widok z bliska na podłączenia na płytce zasilającej. Czerwone przewody zasilające +5V od serw podłączone muszą być do pinów 5V, przewody czarne - z masą - do pinów GND, dodatkowy przewód z masą musi połączyć pin GND na płytce zasilającej z pinem GND na Arduino.
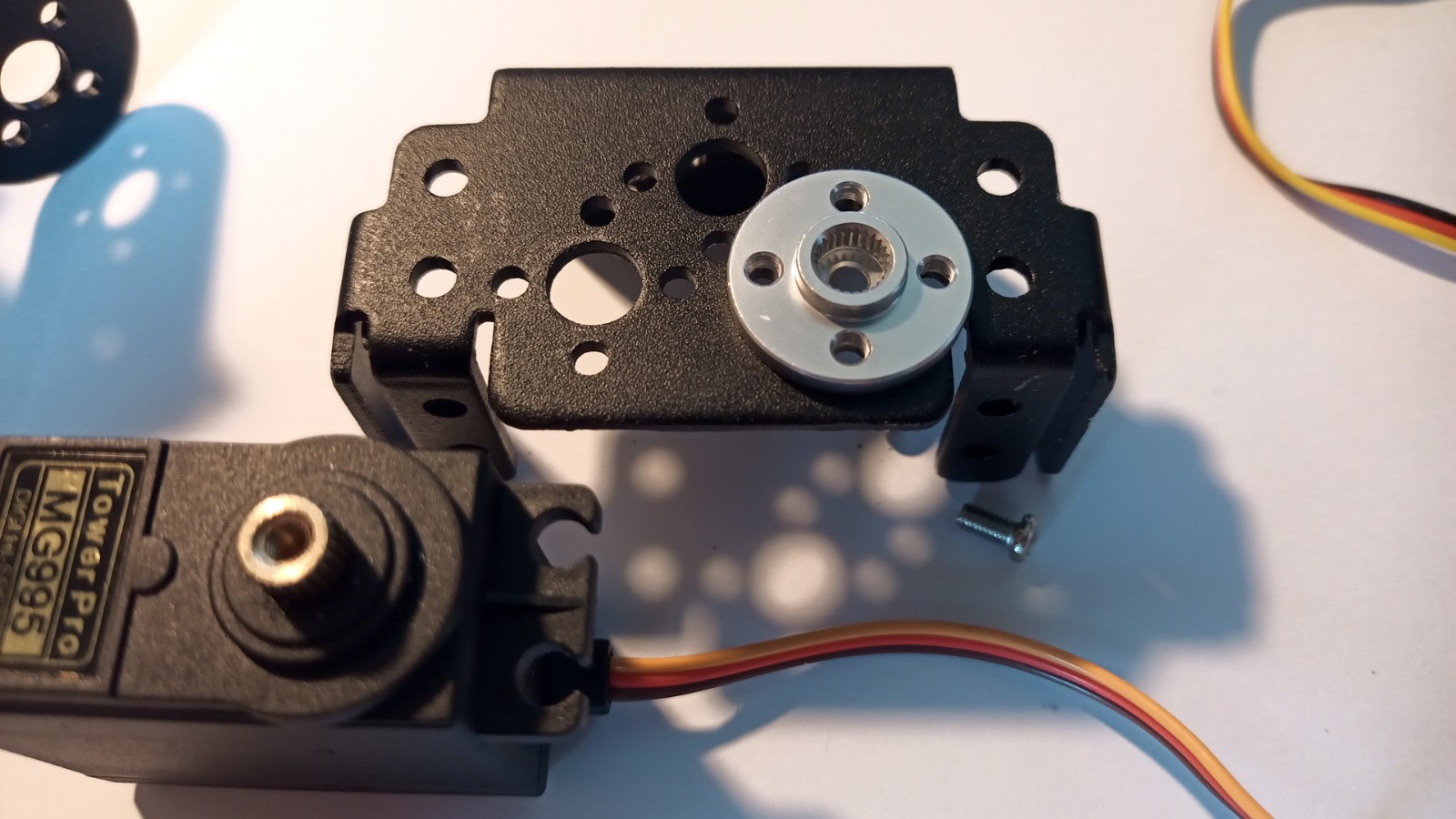
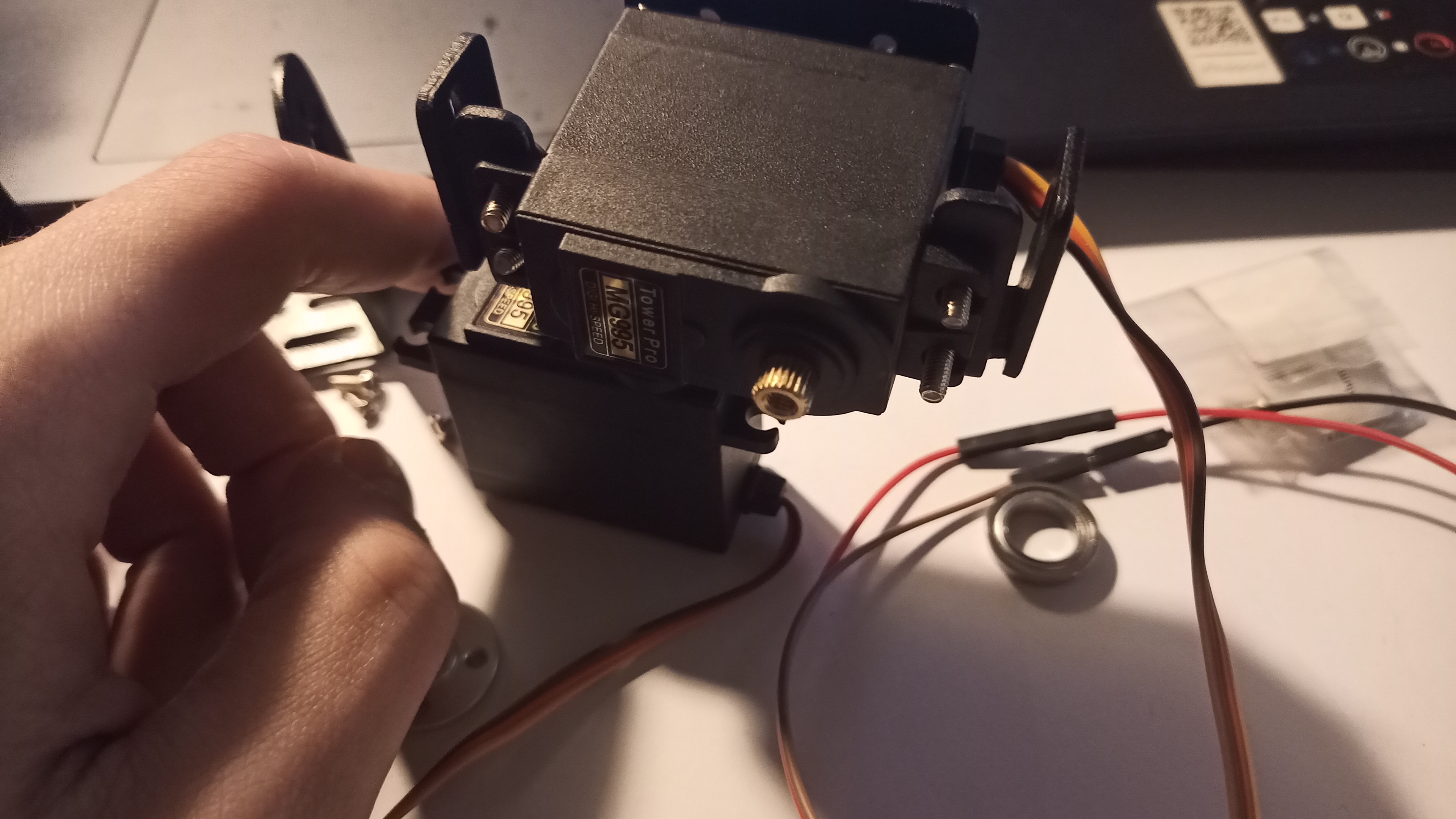
5) Mając już serwa ustawione w pozycjach 90 stopni przygotuj dolną część mocowania do serwa i od jego spodu nałóż na niego aluminiowy okrągły orczyk (jak na zdjęciu). Orczyk będzie mocowaniem dla serwa. Do jego przykręcenia do mocowania będą potrzebne 4 śruby, dodatkowa 5 śruba potrzebna będzie do przykręcenia orczyka do zębatki serwa.
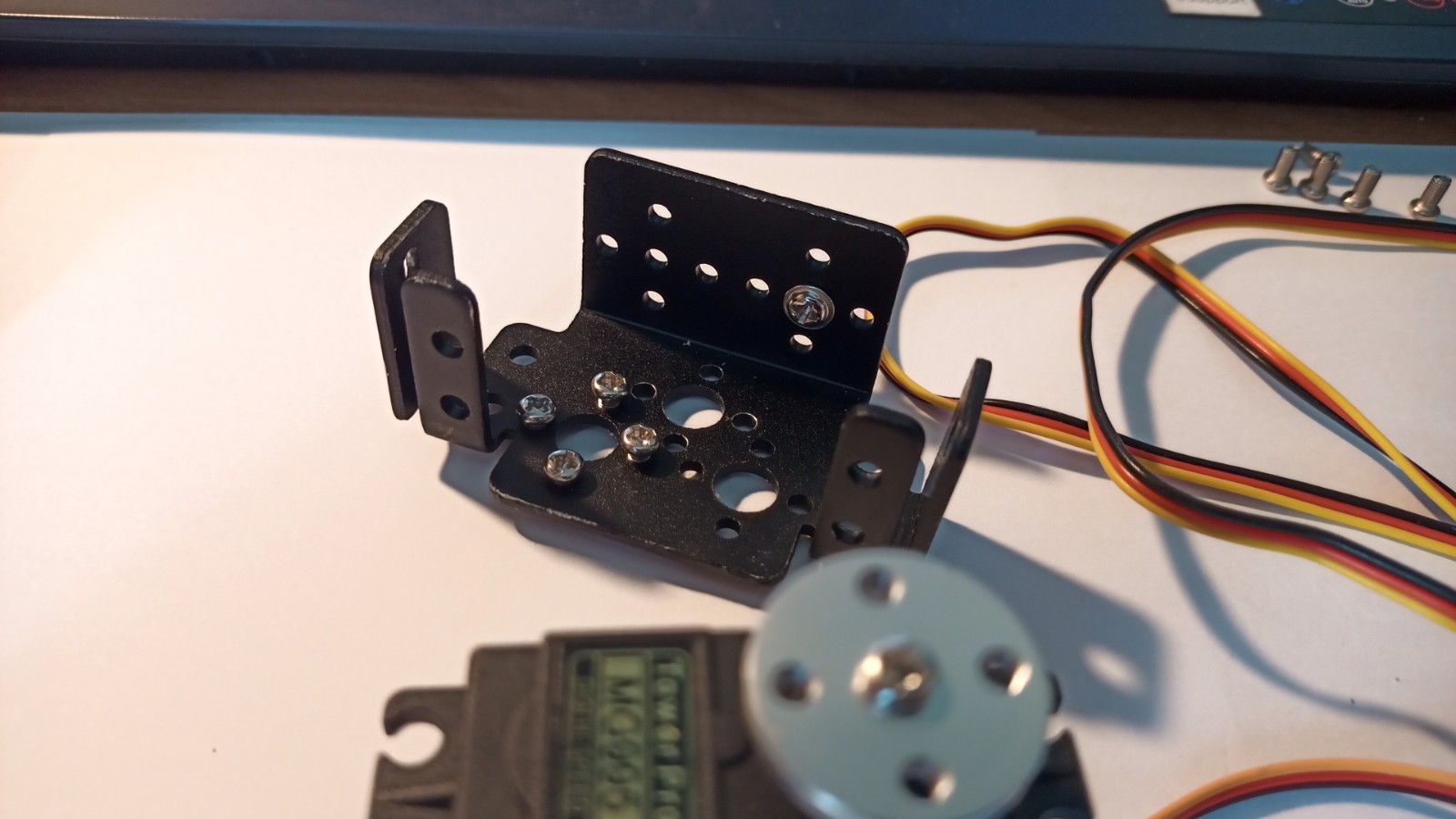
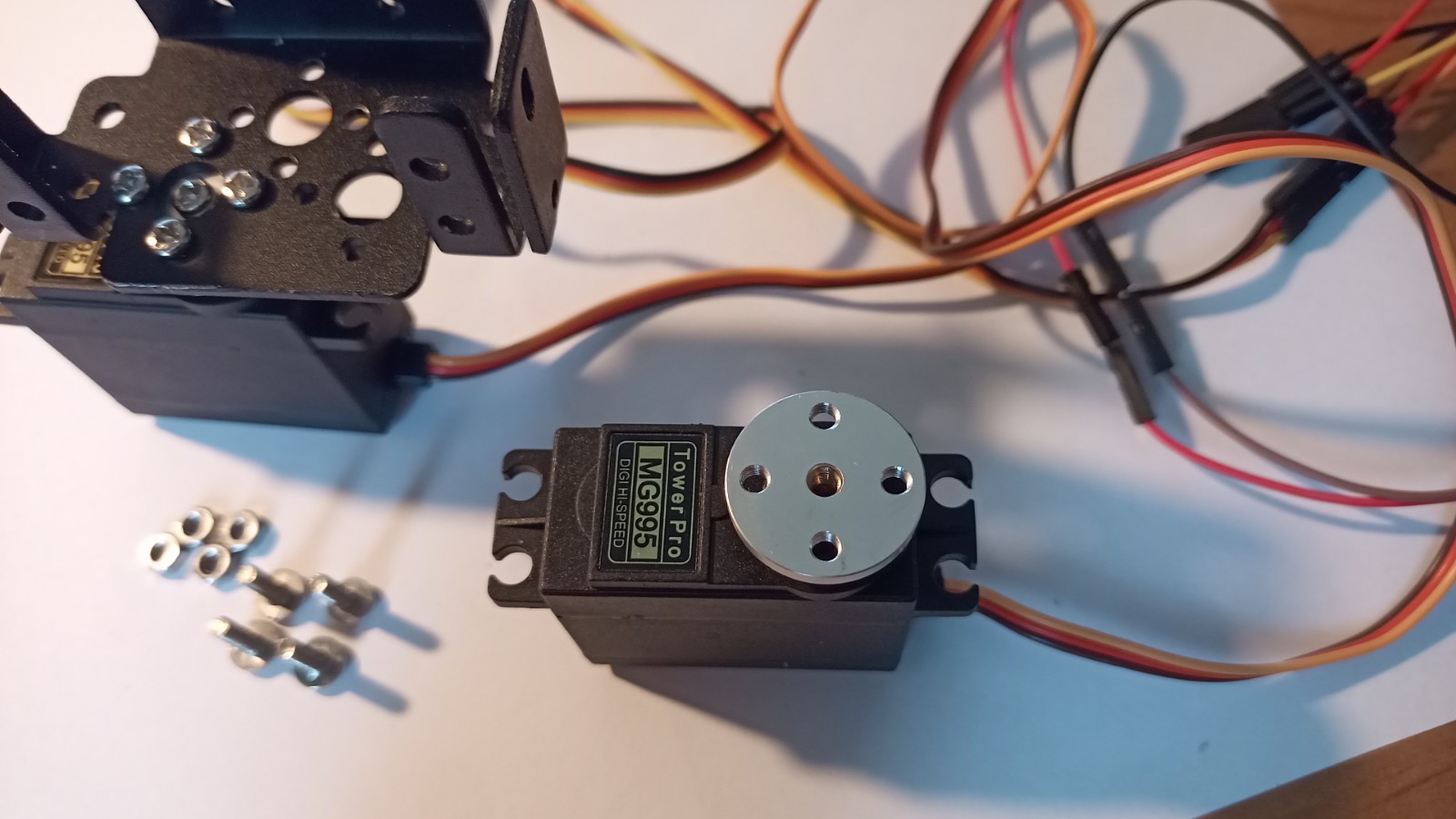
6) Widok na dolne mocowanie serwa z nałożonymi śrubami, obok znajduje się nałożony na zębatki serwa orczyk - śruby z mocowania będą w następnym kroku nałożone na orczyk.
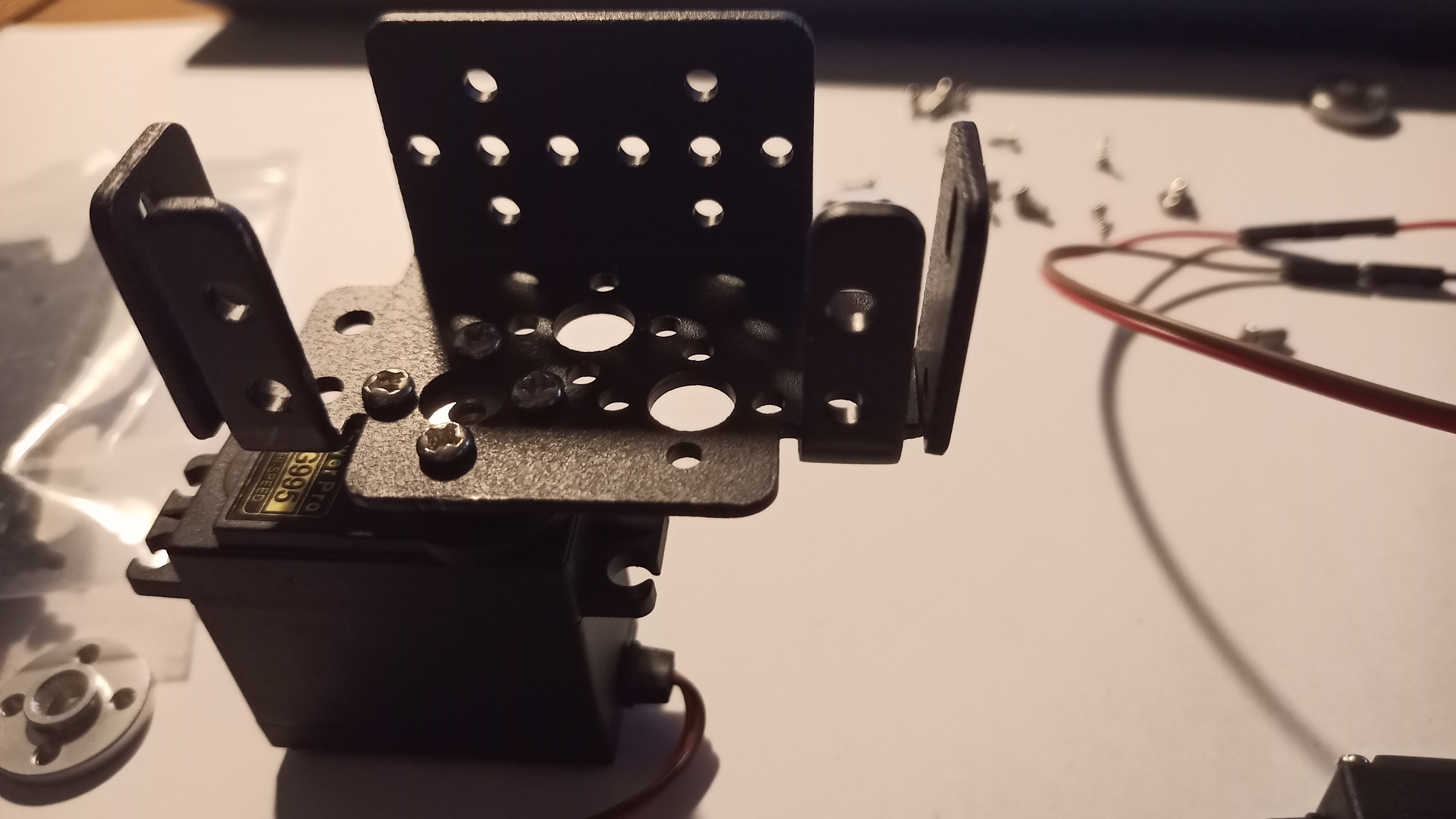
7) Nałóż mocowanie i śruby na orczyk umieszczony na zębatkach, tak aby śruby dopasowały się do otworów i aby serwo ustawione było w pozycji jak poniżej.
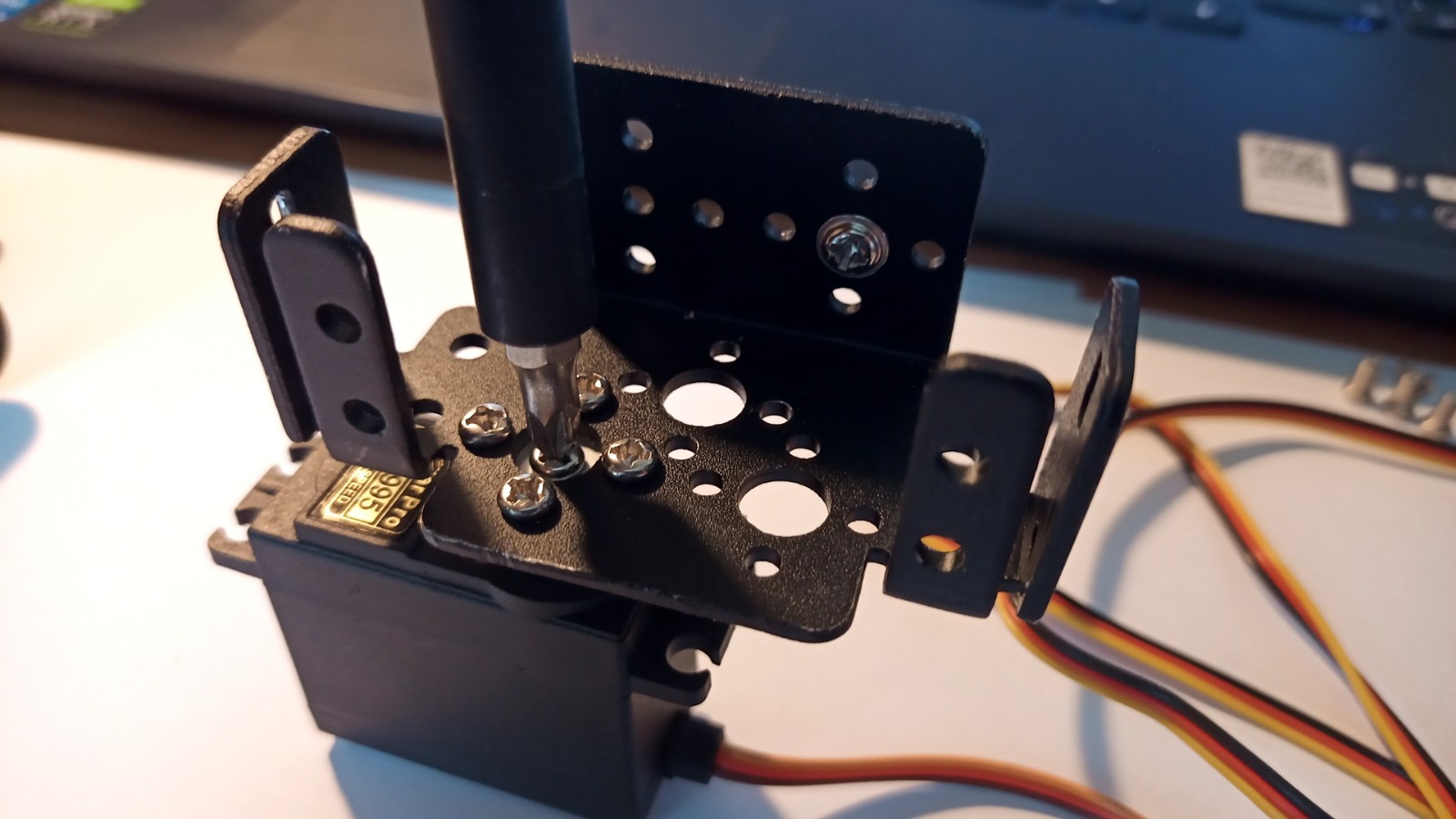
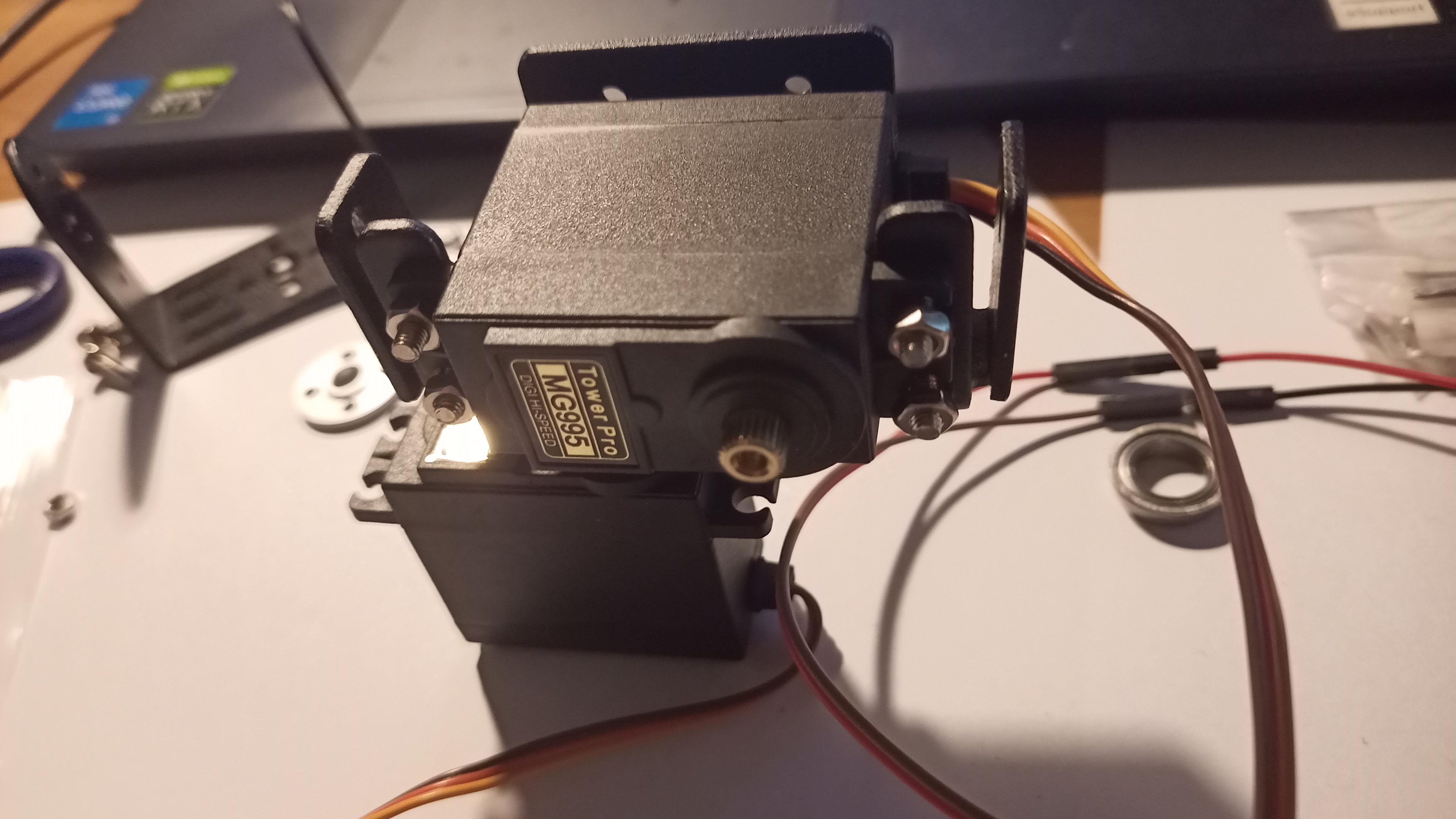
8) Mając już odpowiednio nałożone mocowanie i orczyk na zębatce, przykręć od góry orczyk do zębatki za pomocą piątej, środkowej śruby jak na zdjęciu poniżej. Zwróć uwagę na śrubę, która pojawiła się z boku po prawej stronie mocowania - będzie przykręcana w kolejnych krokach.
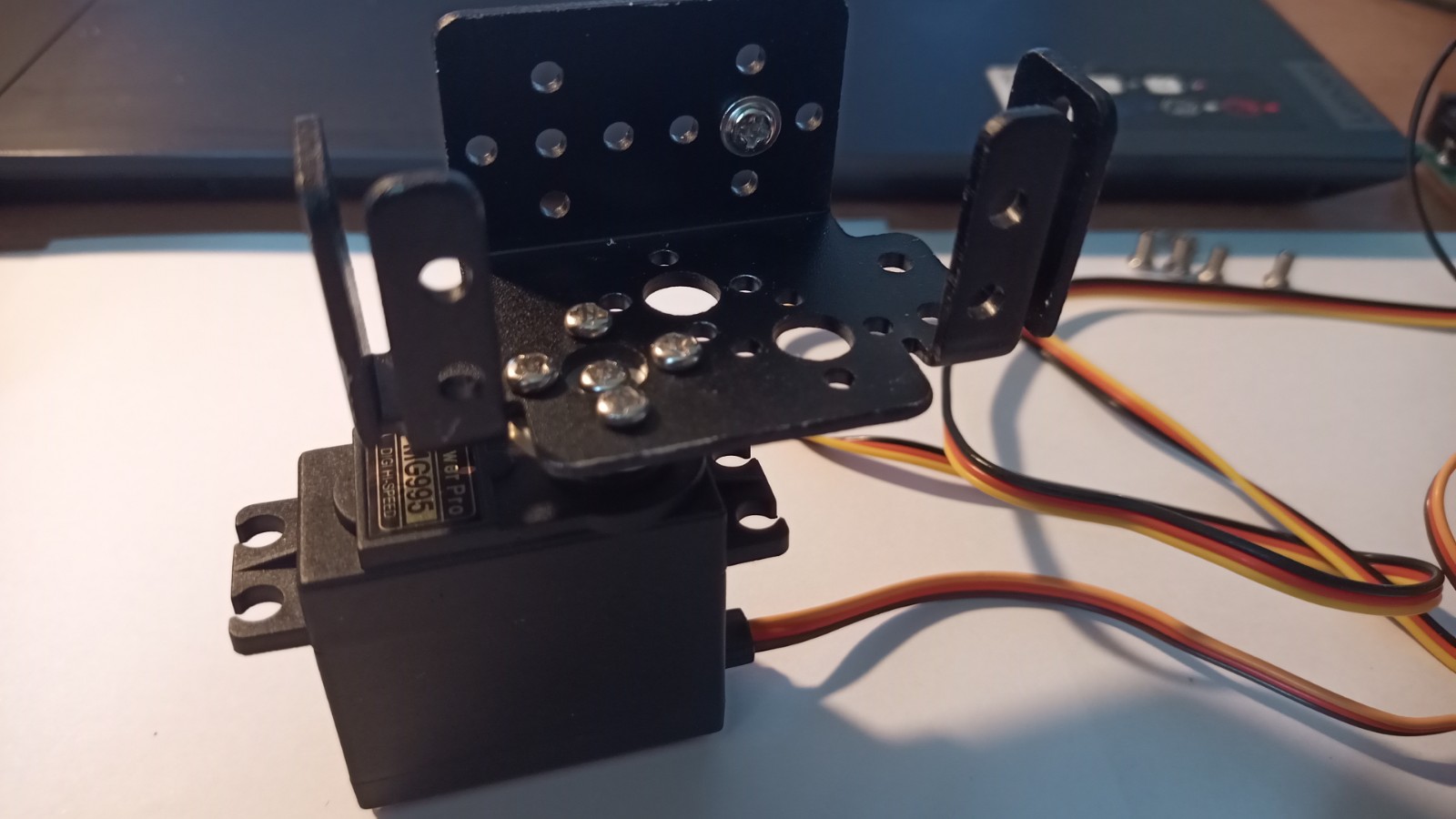
9) Poniżej widok na prawidłowo nałożone i przykręcone do serwa dolne mocowanie.
10) Z boku dolnego mocowania (po przeciwległej stronie od serwa) od środka nałóż śrubę widoczną na poprzednich zdjęciach, a następnie od zewnątrz nałóż okrągłą obręcz jak na zdjęciu poniżej.
11) Na śrubę nałóż od zewnątrz nakrętkę i przykręć ją do mocowania. Śruba z nakrętką będzie zapobiegać wysunięciu się nakładki po nałożeniu górnej części mocowania.
12) Przygotuj górną część mocowania serwa i przykręć do niej mocowanie kamery dwiema śrubami i dwiema nakrętkami jak poniżej.

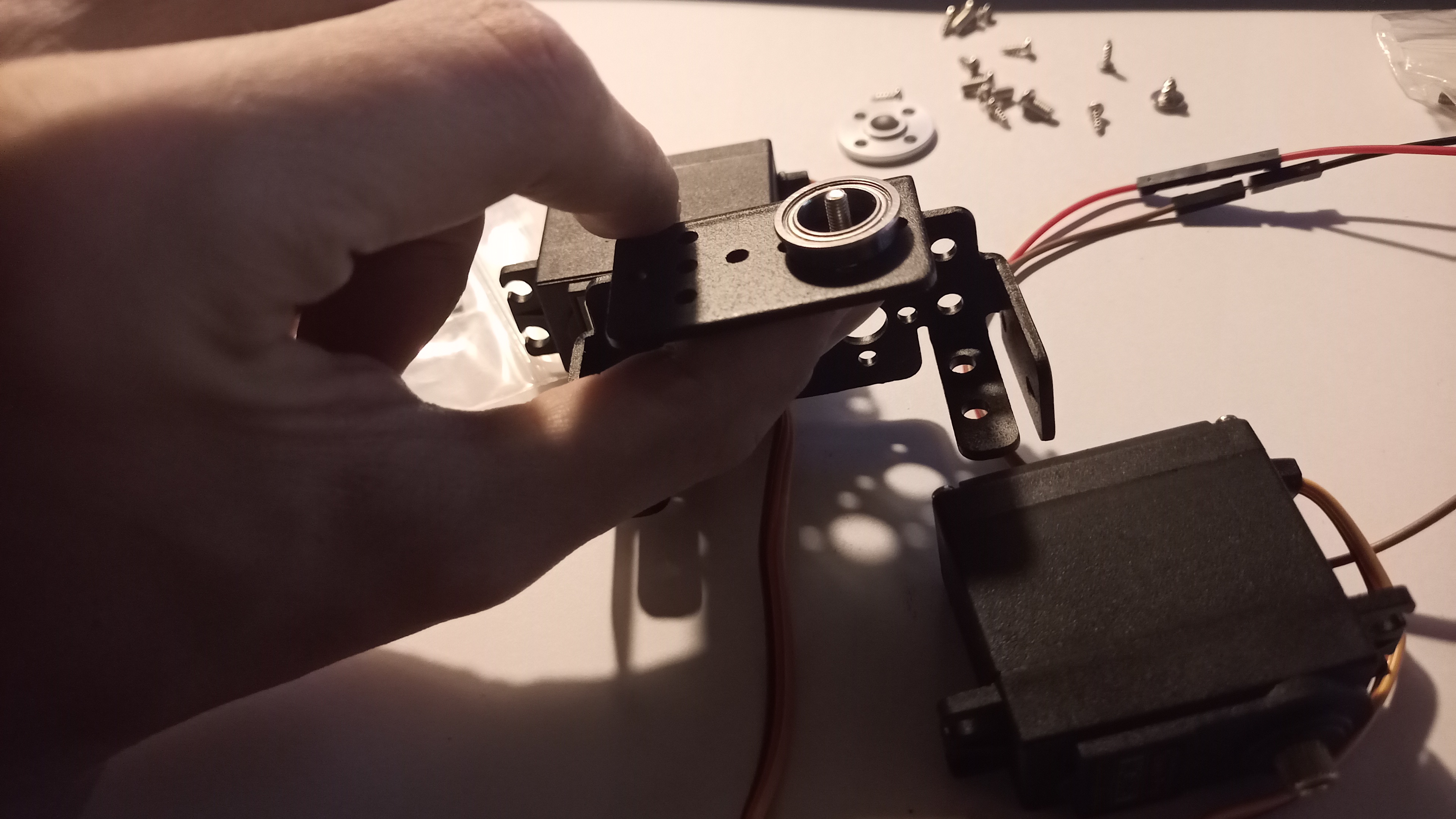
13) Wsuń od wewnątrz 4 śruby do dolnej części mocowania serwa - za chwilę będziesz musiał nałożyć na nie od zewnątrz otwory znajdujące się na brzegach serwomechanizmu.
14) Nałóż górne serwo w pozycji jak poniżej, utrafiając otworami z serwa w śruby włożone wcześniej do mocowania.
15) Przykręć od zewnątrz wszystkie 4 śruby za pomocą nakrętek mocując tym samym górny serwomechanizm.
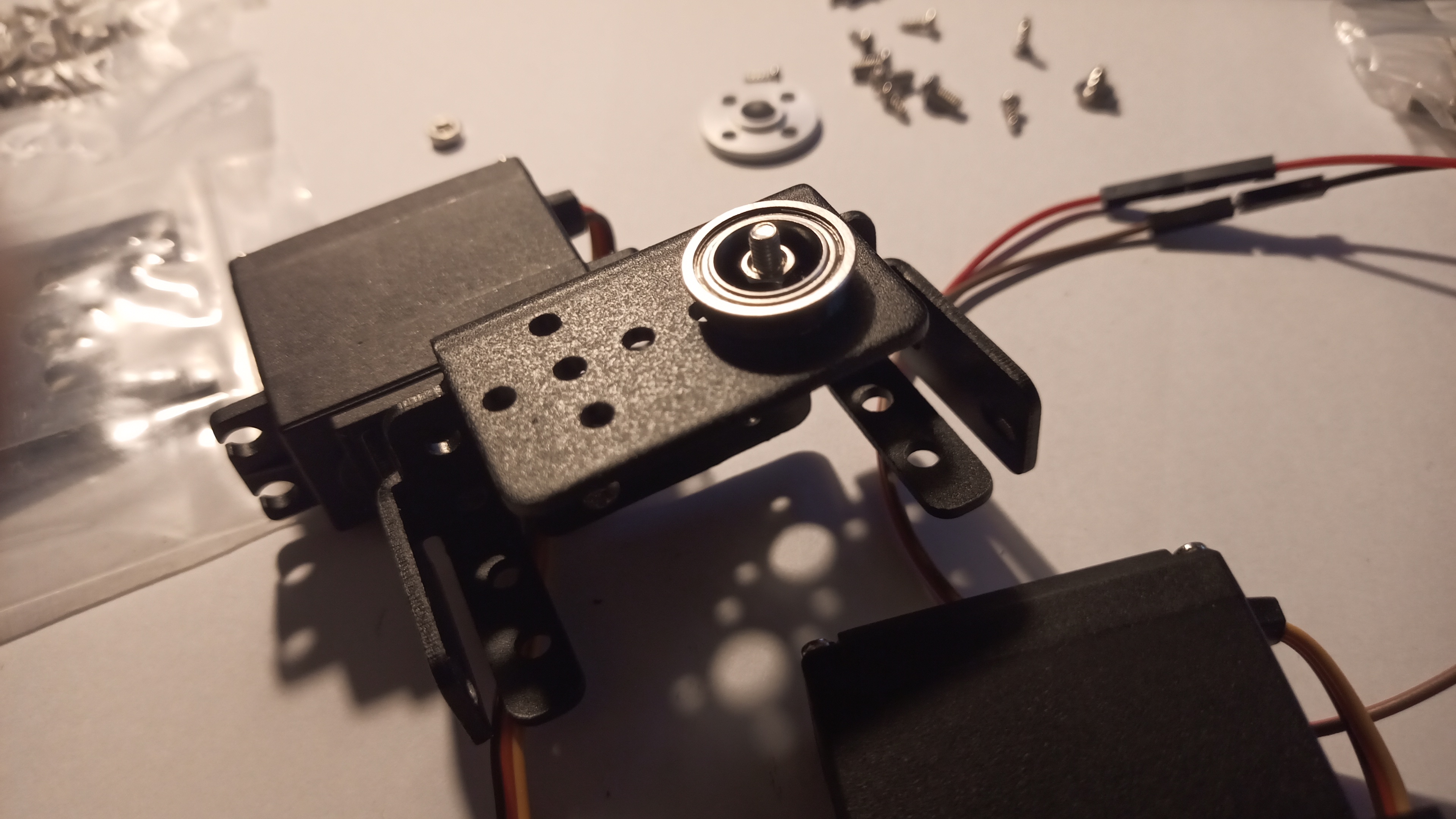
16) Na górne serwo nałóż aluminiowy okrągły orczyk, za chwilę nałożysz na niego i przykręcisz górną część mocowania.
17) Nałóż od góry górną część mocowania rozpoczynając nakładanie jak poniżej.

18) Ulokuj górną część mocowania na orczyku (a od drugiej strony na nakładce), w pozycji jak poniżej. Dopasuj górną część tak, aby otwory na śruby w mocowaniu pasowały do otworów na śruby w orczyku.

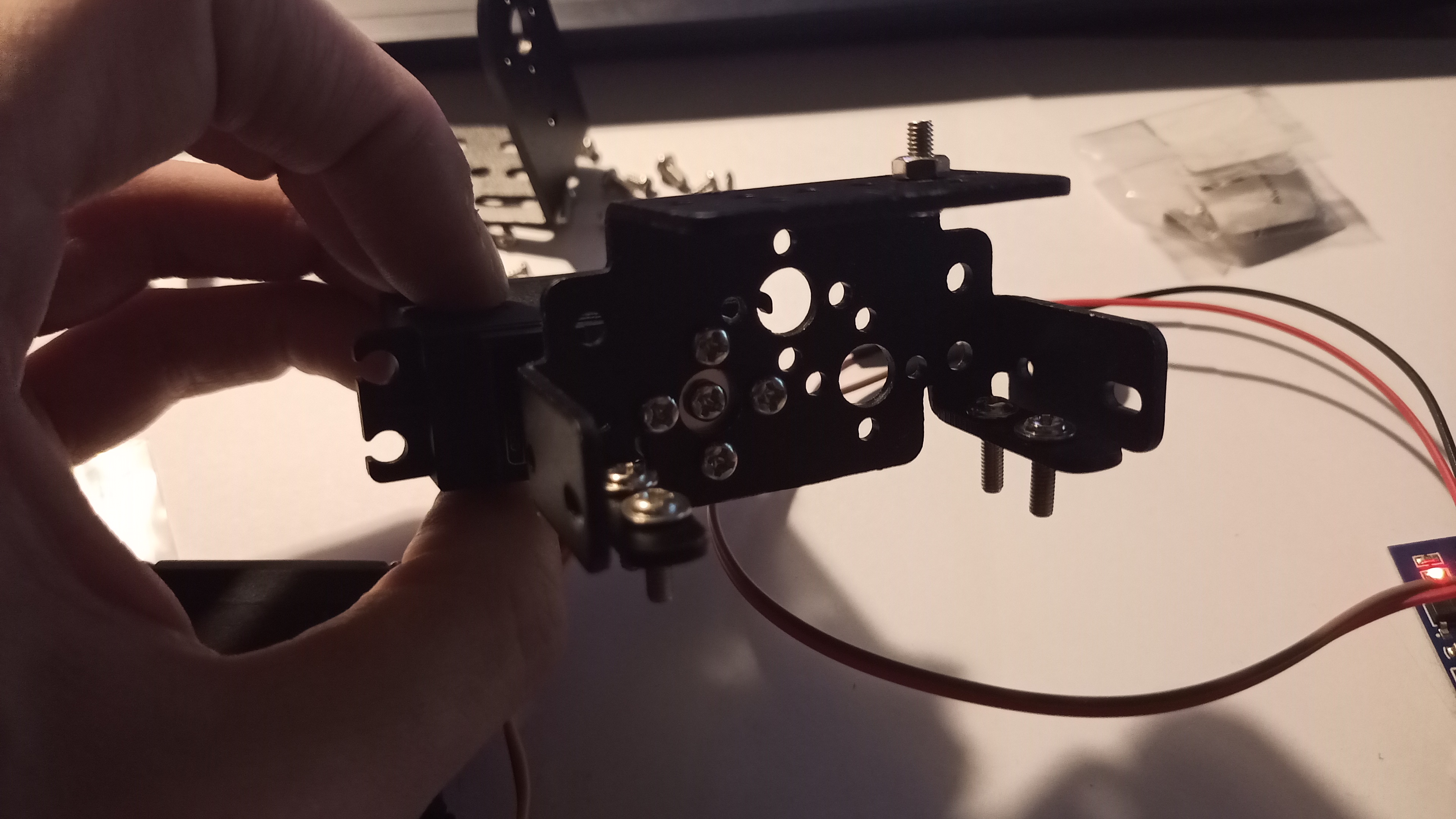
19) Włóż i dokręć od boku 4 śruby mocujące orczyk do mocowania serwa. Za pomocą 5 śruby przykręć orczyk do zębatki serwa. Zwróć uwagę na założoną pionową część mocowania do kamery - nie nakładaj jej teraz, za chwilę będziesz montować do niej kamerę (oddzielnie będzie to wygodniejsze).
20) Widok z profilu (ze zdjętą mniejszą pionową częścią mocowania dla kamery).
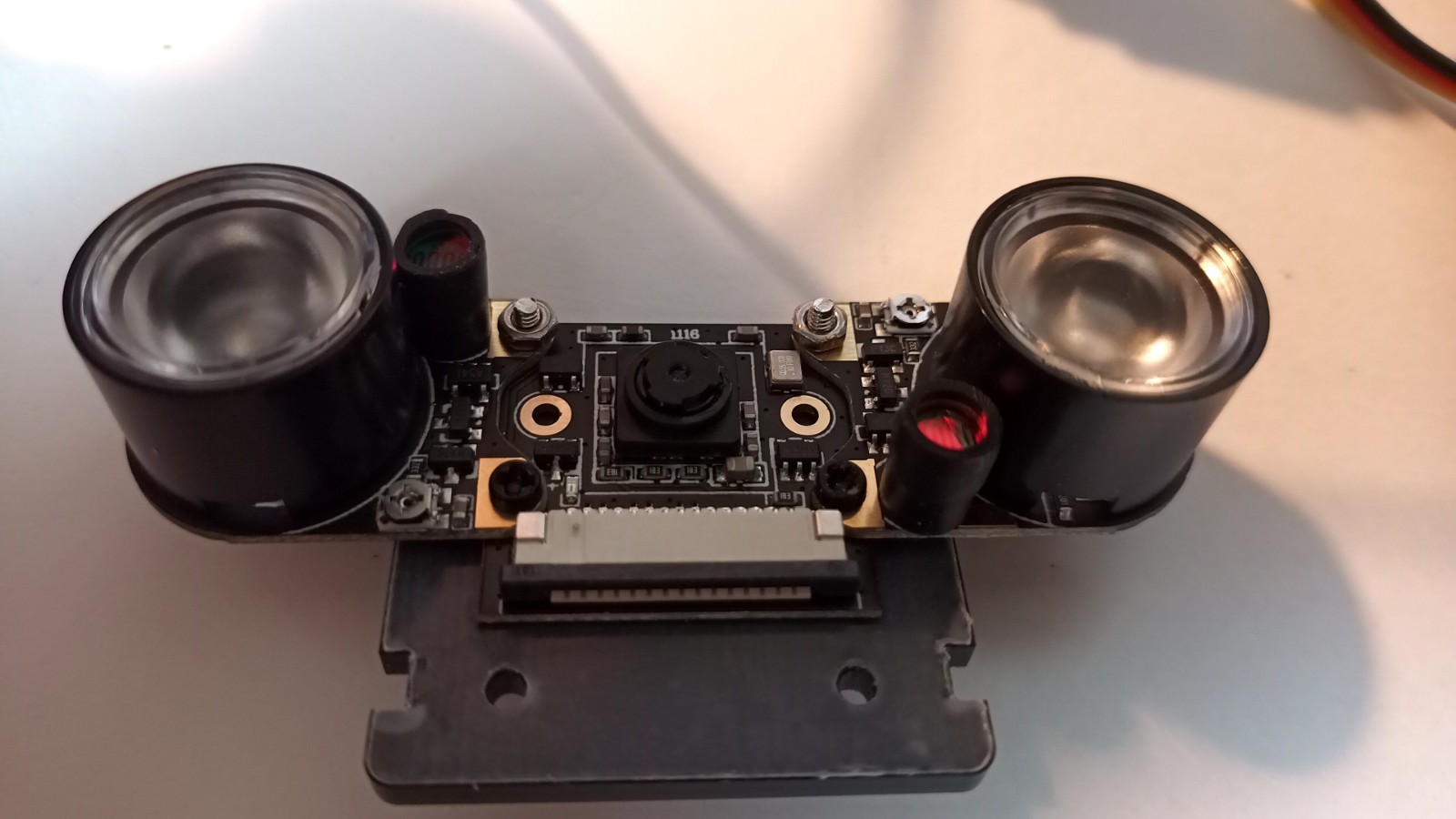
21) Przygotuj kamerę, po bokach płytki z kamerą nałóż na płytkę z kamerą boczne reflektory IR i przykręć reflektory za pomocą 2 górnych śrub i 2 nakrętek jak poniżej. Dwie kolejne dłuższe śruby włóż od zewnątrz do zewnątrz w otwory dolne na płytce kamery i za ich pomocą przymocuj kamerę do pionowego mocowania (widocznego na zdjęciu nr19), przykręcajac na śruby po drugiej stronie 2 nakrętki.
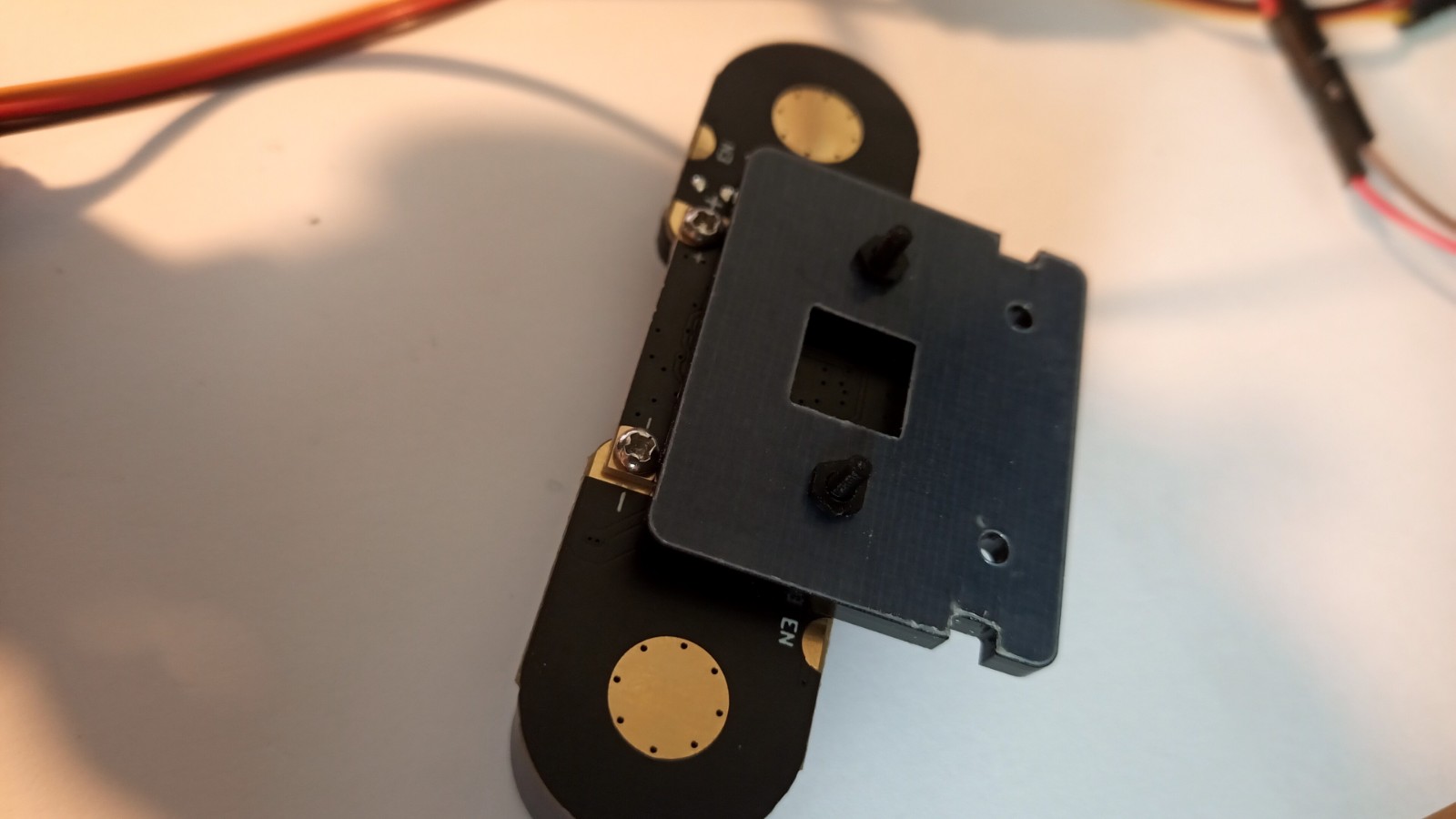
22) Widok od tyłu na płytkę z kamerę przykręconą do mocowania (zwróć uwagę na oznaczenia + / - znajdujące się z tyłu płytki).
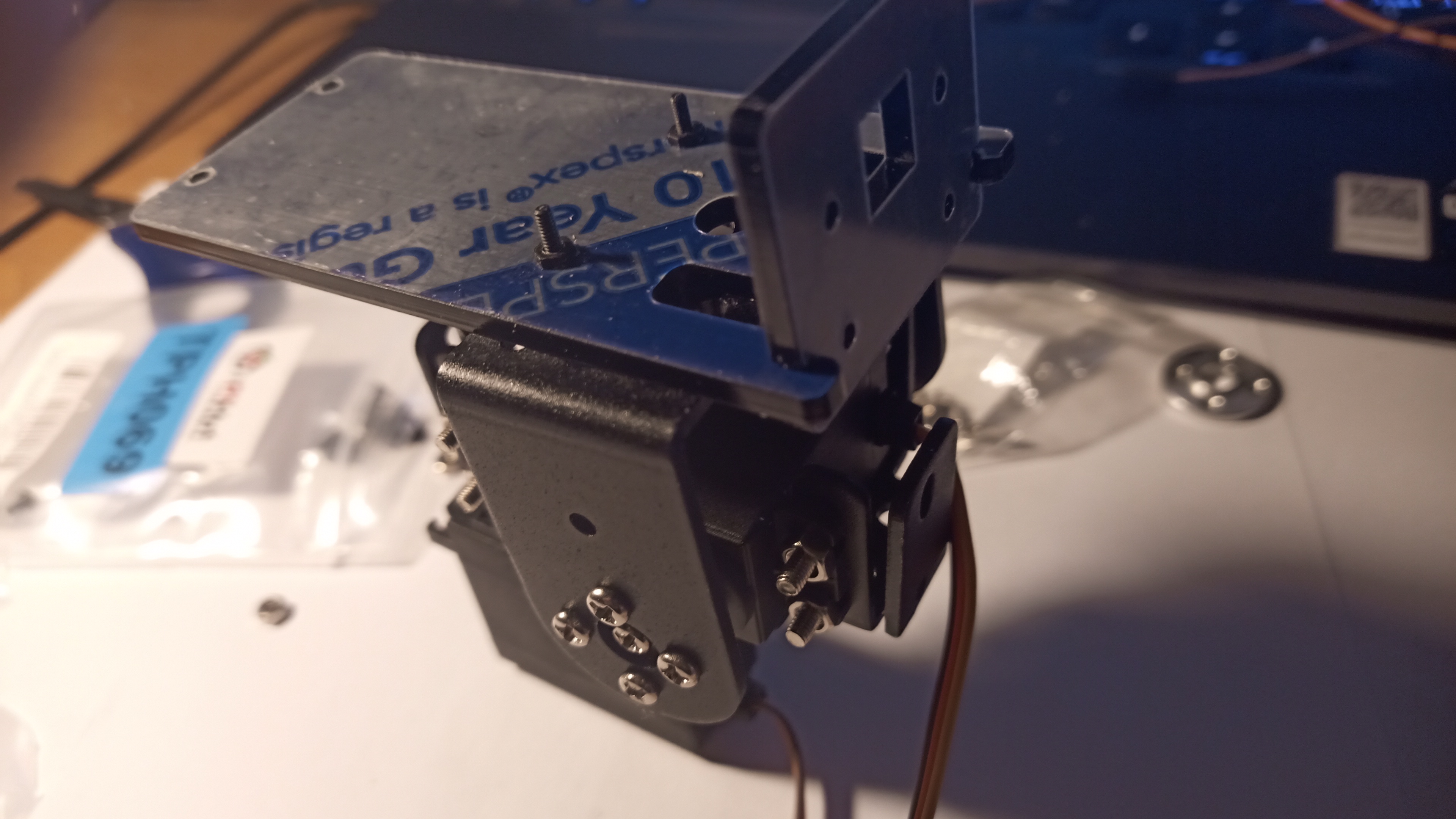
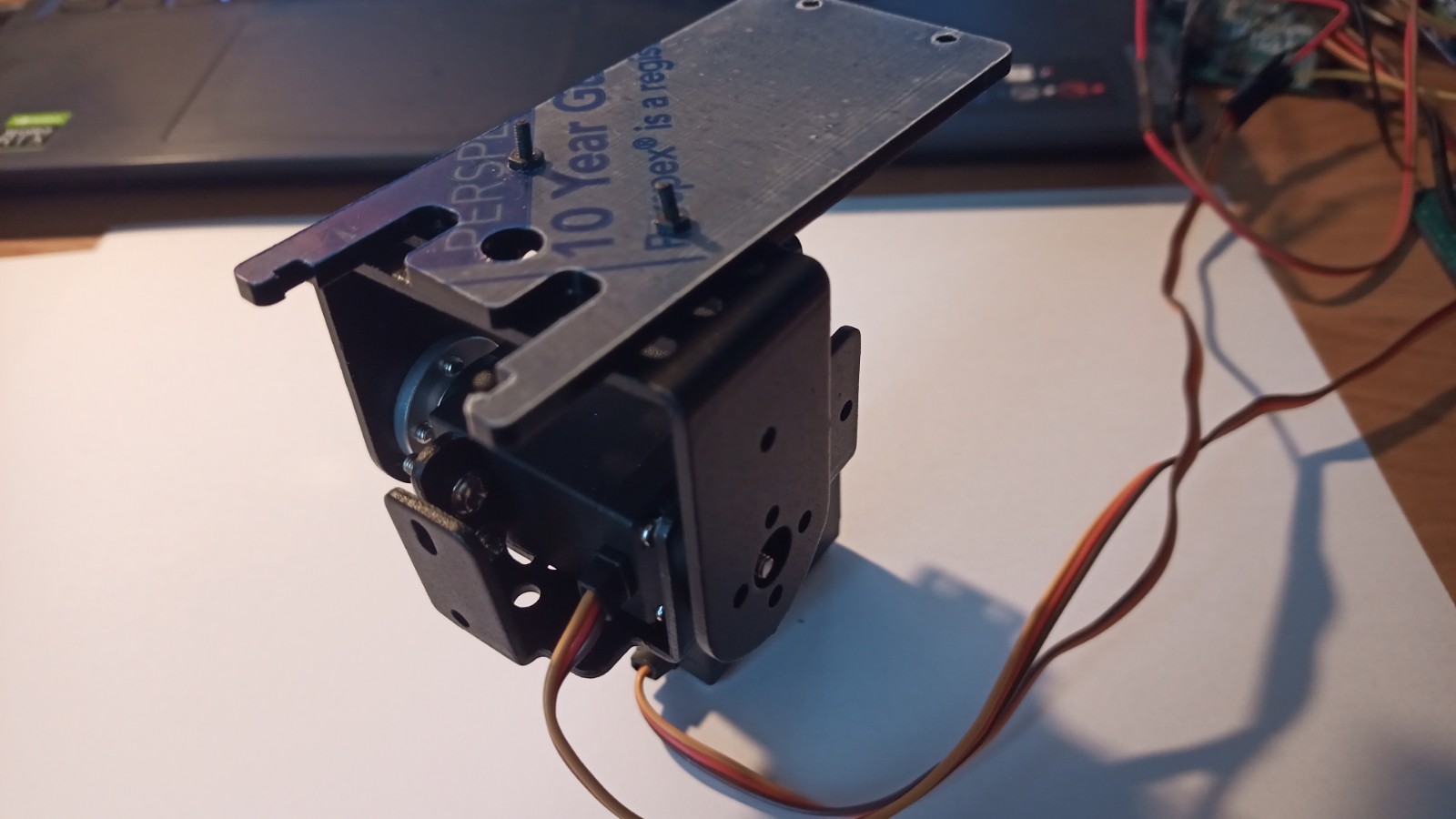
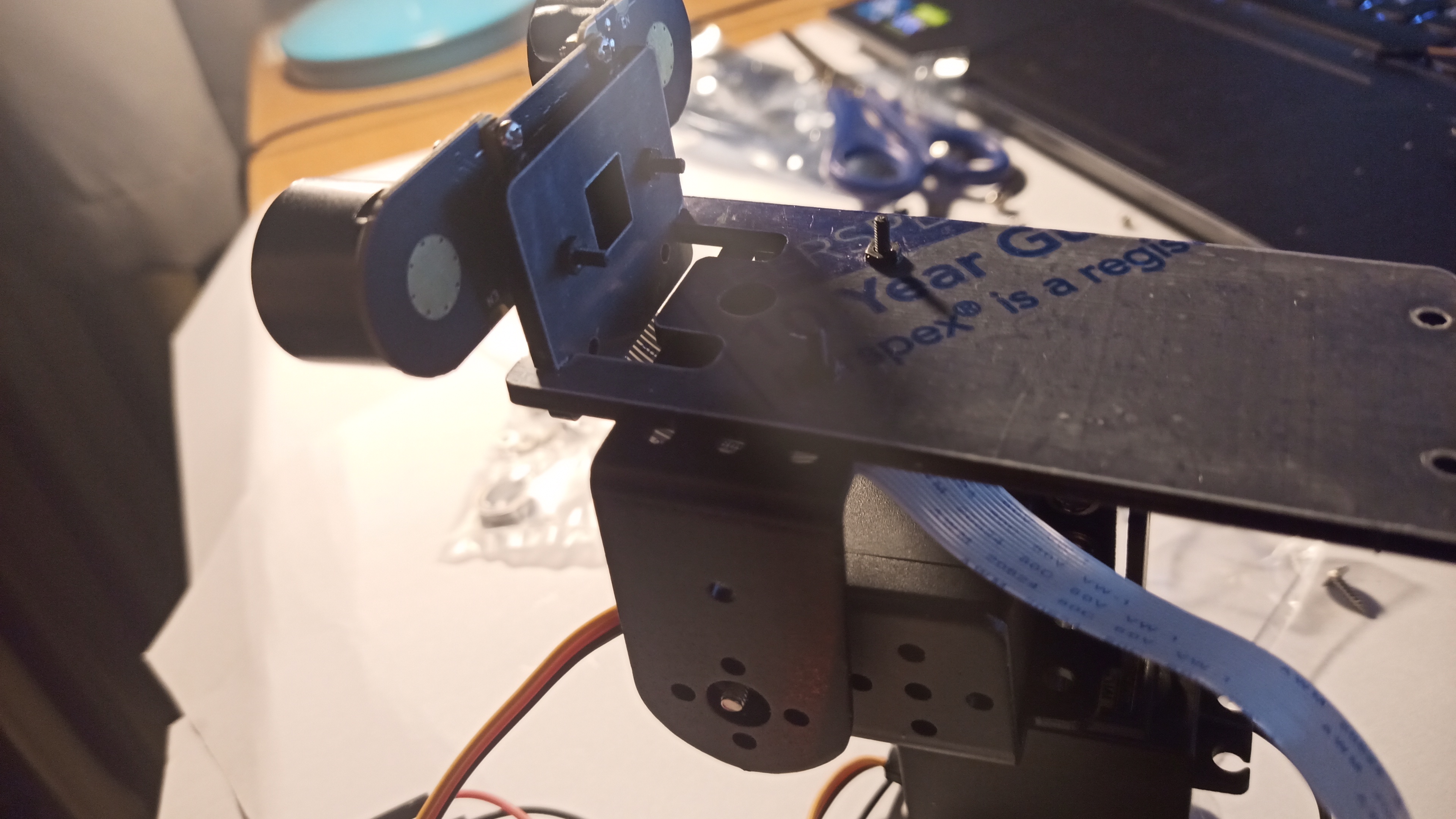
23) Następnie kamerę wraz z przykręconym mocowaniem nałóż na podłużną część mocowania kamery zamontowaną uprzednio. Do kamery podłącz 60cm taśmę (lub dłuższą, jeśli posiadasz). Niebieska część taśmy powinna być skierowana do przodu kamery, jak na zdjęciu. Następnie przeciągnij taśmę pod górnym mocowaniem serwa i drugą jej część podłącz do złącza CSI znajdującego się na płycie głównej Raspberry.
24) Widok od tyłu.
25) Widok z góry.

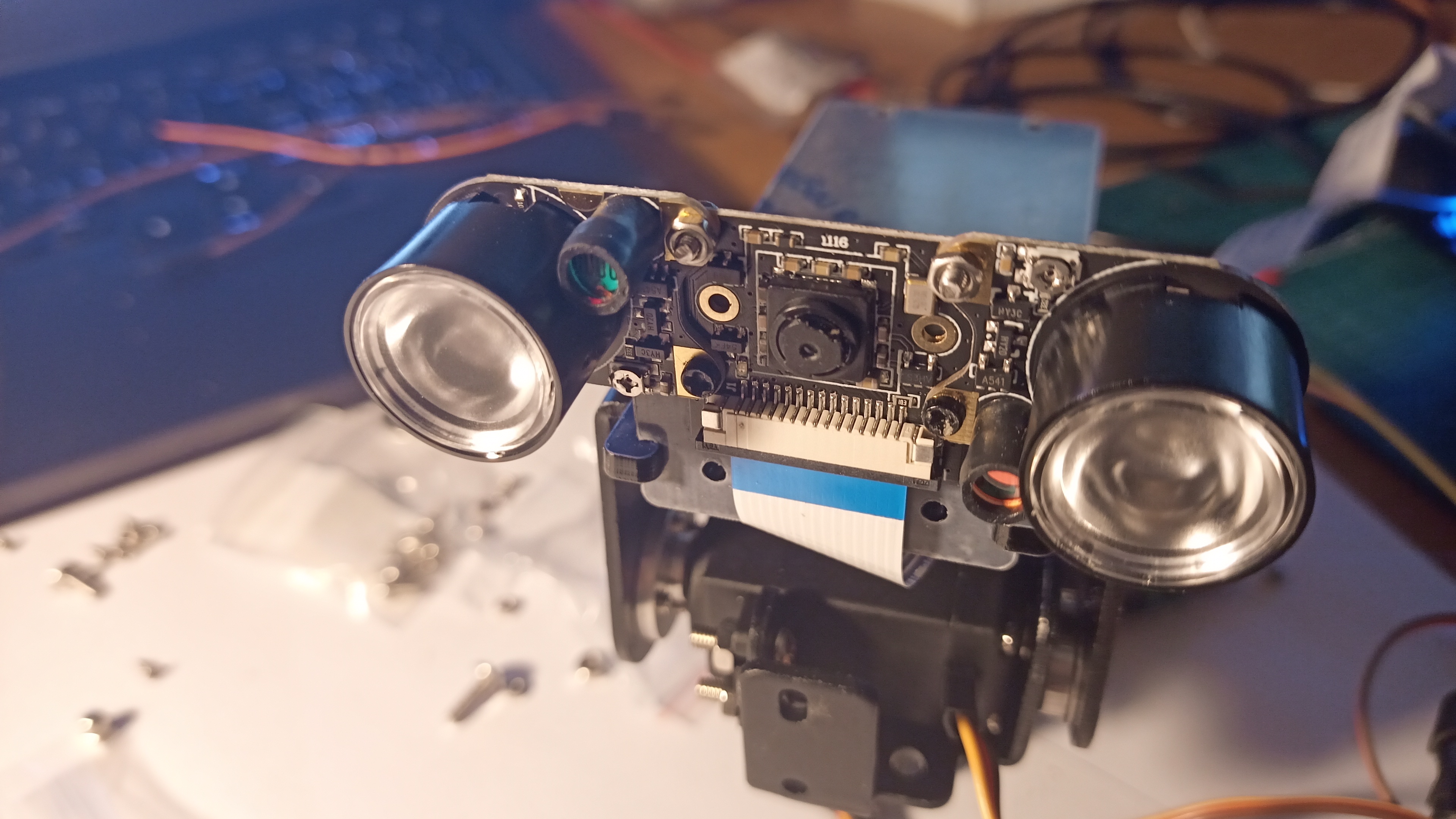
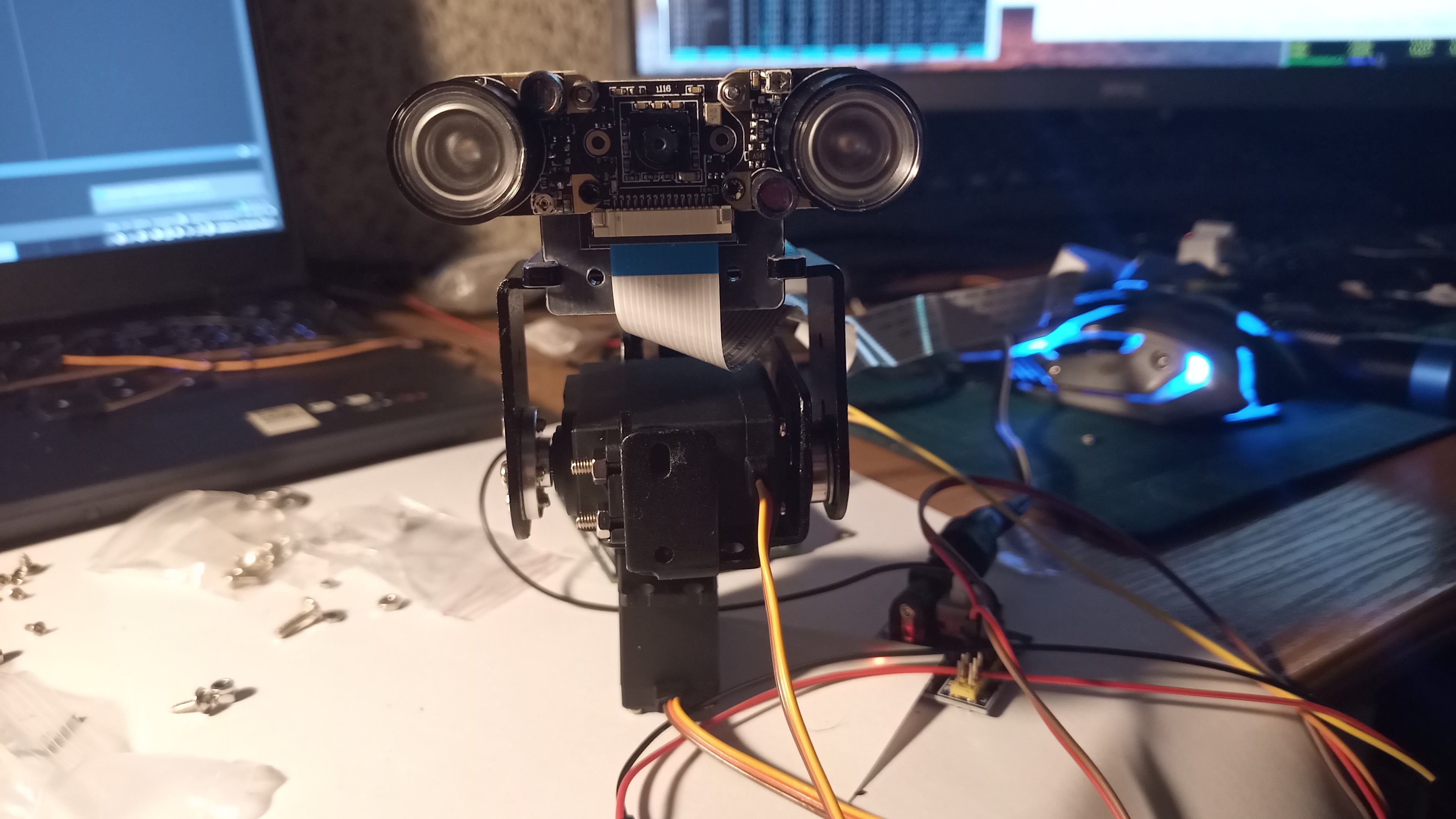
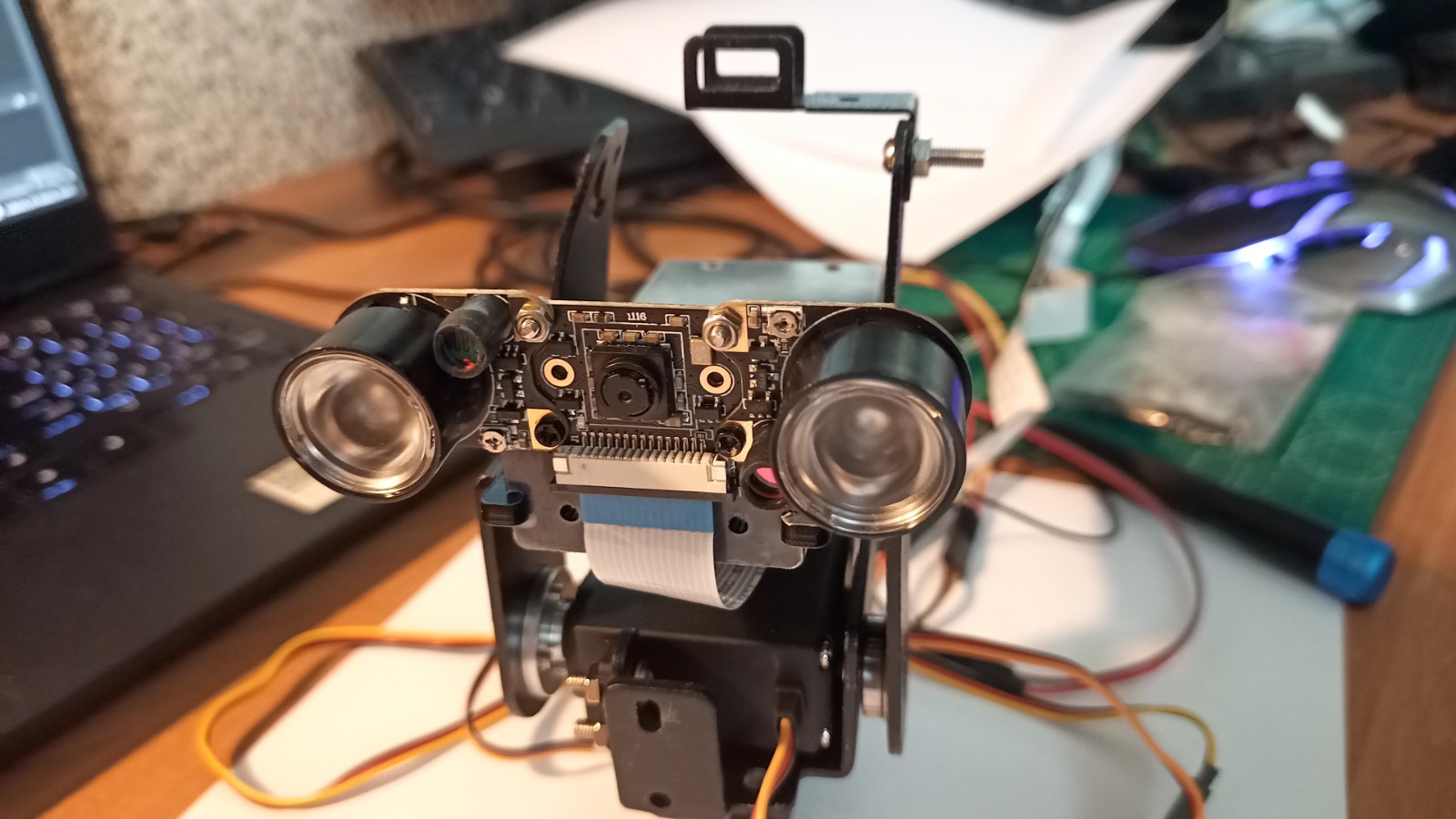
26) Widok z przodu.
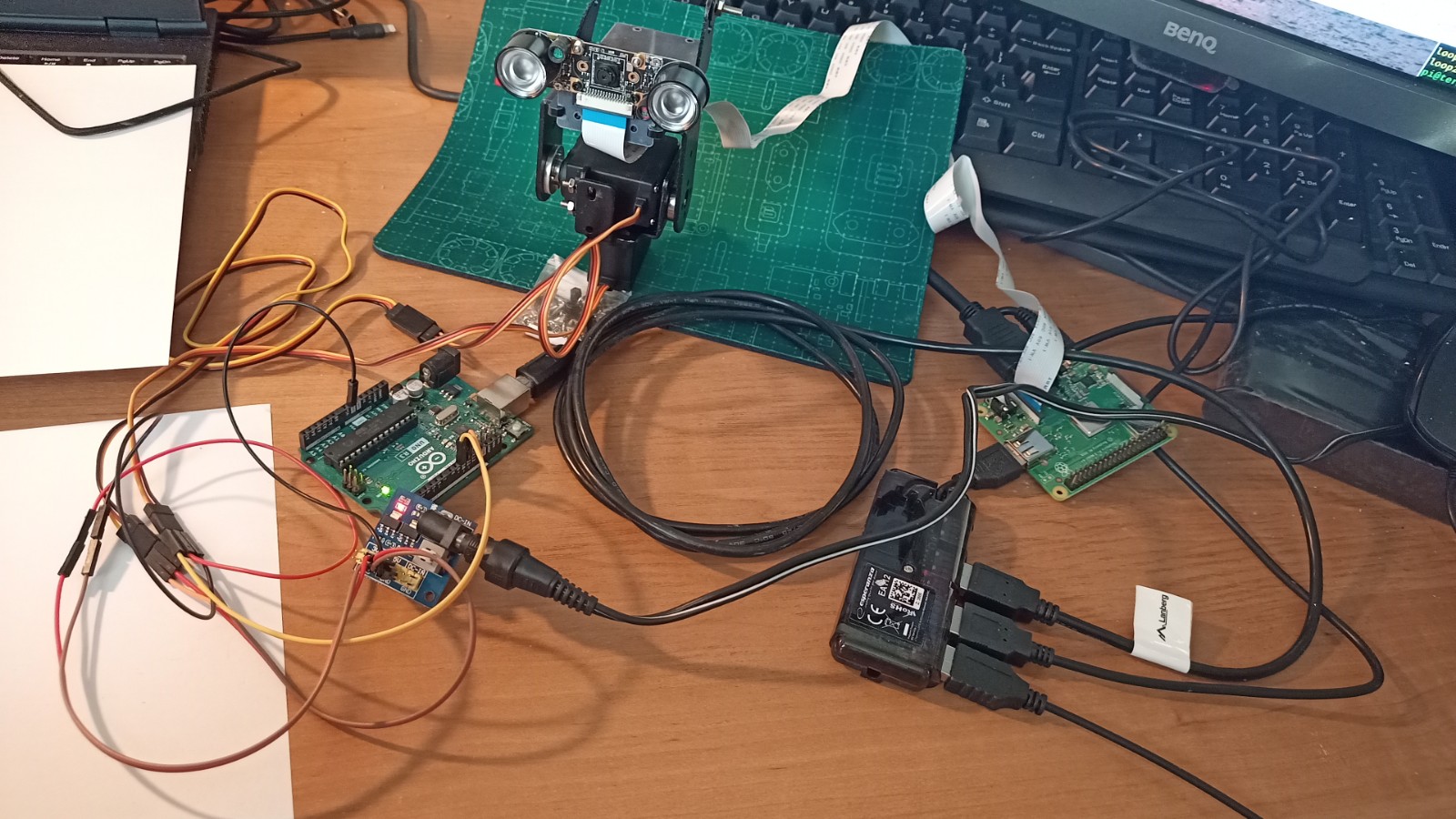
27) Widok na podłączoną taśmę CSI biegnącą od kamery do płyty głównej Raspberry (na zdjęciu znajduje się Raspberry Pi 3 model A+, ale możesz tutaj użyć dowolnego modelu). Do złącza USB w Raspberry podłącz HUB-a USB, a następnie do HUB-a podłącz za pomocą kabla USB Arduino. Niebieska część taśmy powinna być skierowana w stronę jak na zdjęciu.

28) Widok z bliska na płytę główną Raspberry. Od dołu podłączony HUB na 4 porty USB, do którego następnie podłączone jest Arduino. Od lewej podłączony kabel HDMI od monitora i na górze po lewej zasilanie +5V za pomocą zasilacza z wyjściem microUSB. Do złącza CSI podłączona taśma od kamery.

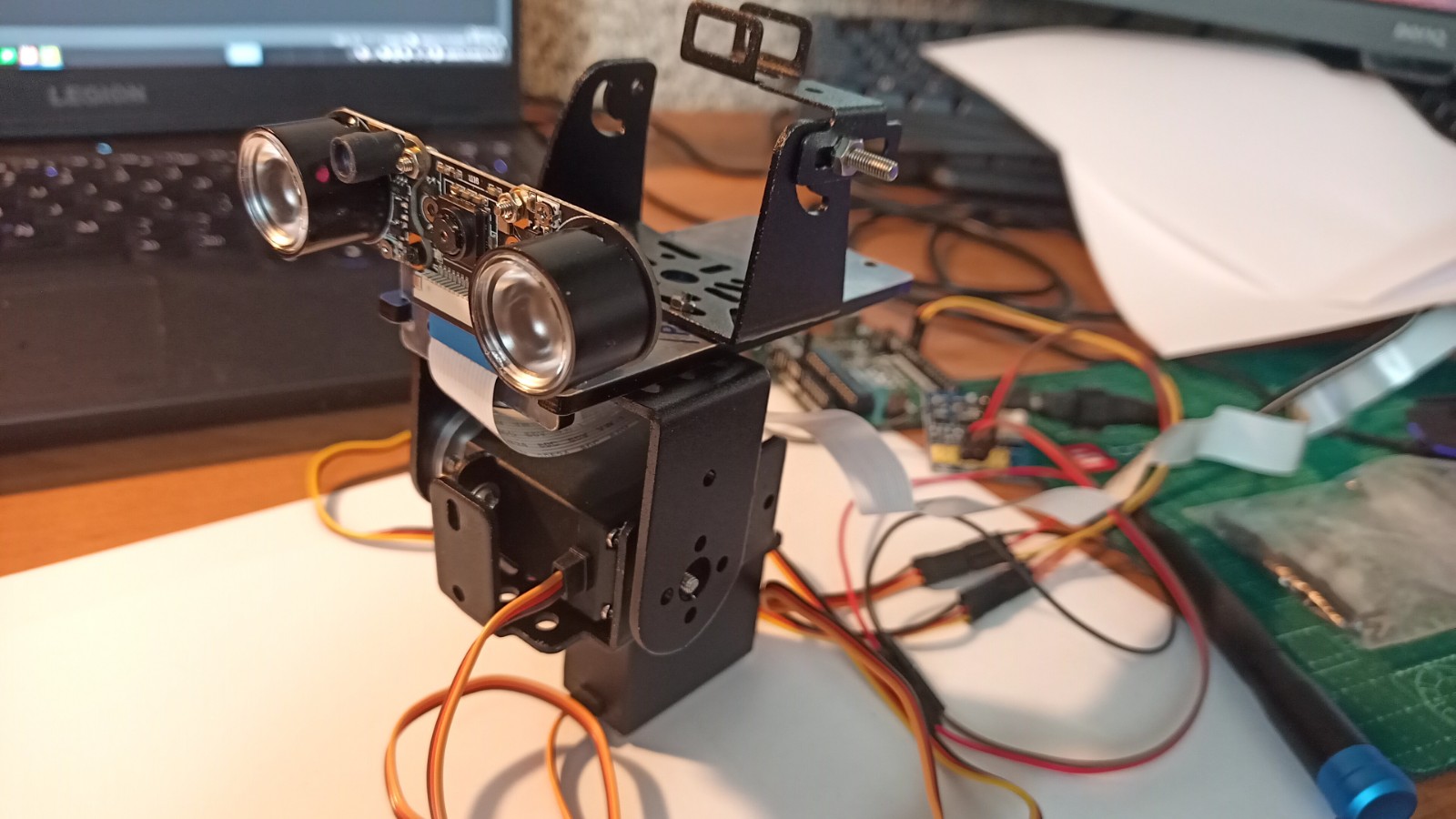
29) Opcjonalnie możesz na górne mocowanie kamery zamontować dodatkowe mocowanie (w celu np. zamontowania czegoś na górze, np. lasera).

30) Górne mocowanie przykręć do wychodzących już śrub za pomocą nakrętek.
31) Gotowe ;)
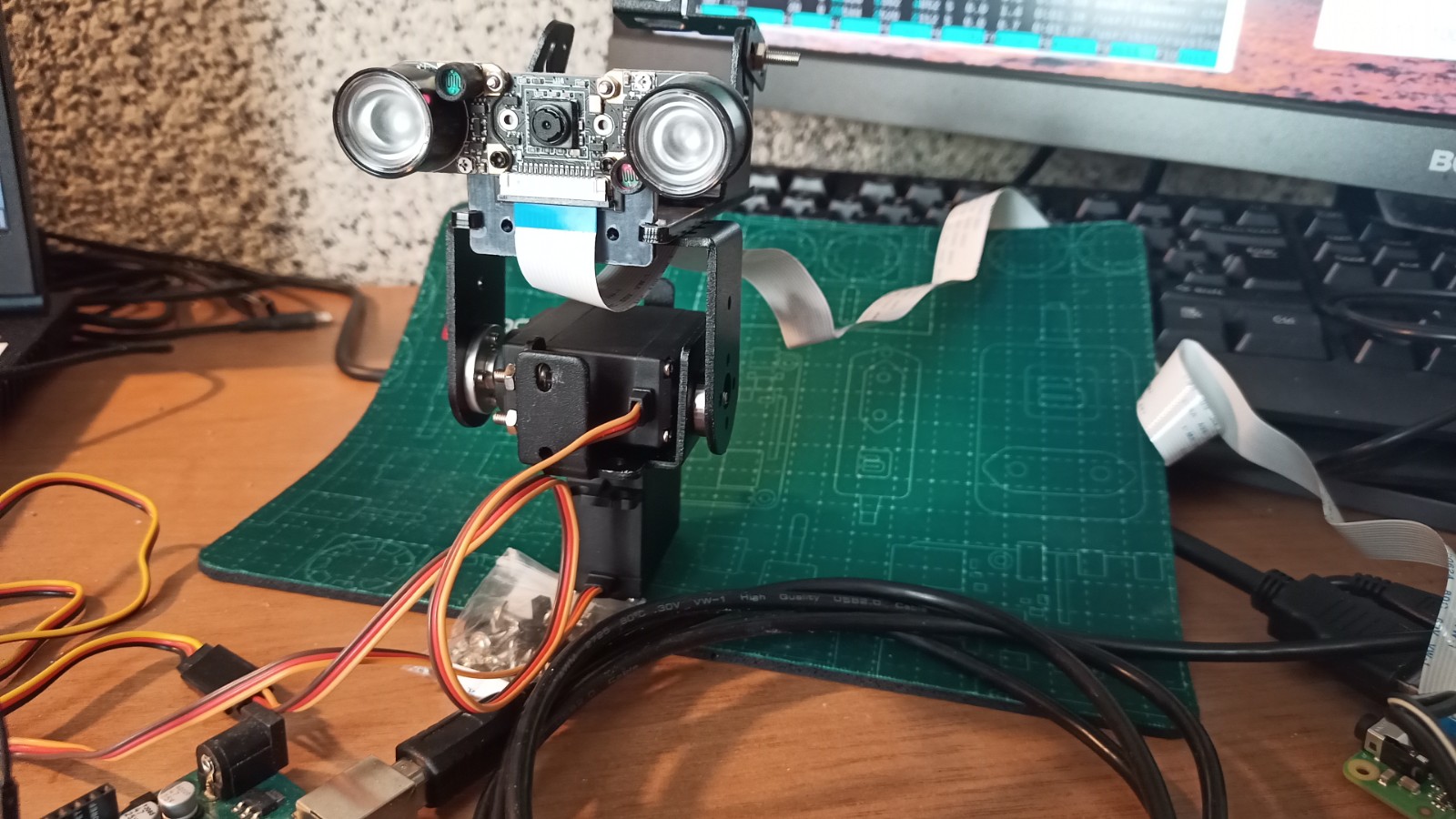
32) Widok na całość konstrukcji.
33) Widok z bliska na całość.
OPROGRAMOWANIE
Przykładowy projekt przedstawiony powyżej pozwala na zdalne sterowanie (poprzez sieć WiFi) za pomocą Raspberry i Arduino. Opcji połączeń jest jednak więcej, m.in. podłączenie lokalne za pomocą portów USB - wszystkie możliwe konfiguracje podłączeniowe znajdziesz w dostępnej dokumentacji. Poniżej skrótowy opis dalszych kroków w przypadku wykorzystania opcji połączenia przedstawionej na zdjęciach:
- na Raspberry wgraj najnowszą wersję systemu Rasbian, możesz użyć do tego czytnika kart SD - włóż kartę SD do czytnika, pobierz program ImageWriter i za jego pomocą wgraj na kartę SD najnowszą wersję systemu Rasbian.
- wyjmij kartę z czytnika i włóż do Raspberry, następnie za pomocą HDMI podłącz do Raspberry monitor, a za pomocą hub-a USB klawiaturę i myszkę. Podłącz do Raspberry zasilanie za pomocą zasilacza 5V z końcówką micro USB.
- uruchom Raspberry i dokończ instalację systemu na karcie SD, tworząc w systemie nowego użytkownika i konfigurując sieć WiFi.
- po instalacji systemu zwiększ rozmiar pliku wymiany do 1GB - szczegóły znajdziesz w dokumentacji.
- za pomocą hub-a USB podłącz Raspberry do Arduino i wgraj na Raspberry oprogramowanie klienckie dostępne w dziale Download - szczegóły instalacji, połączenia pomiędzy urządzeniami, uzytkowania i pełnej konfiguracji znajdziesz w dokumentacji.
Dokumentacja dostępna jest w 2 językach: angielskim i polskim.
Pełne oprogramowanie służące do sterowania całością znajdziesz w dziale: Download.
Link do pełnej, aktualnej dokumentacji wraz z dalszymi instrukcjami:
Pełne oprogramowanie służące do sterowania całością znajdziesz w dziale: Download.
Oprogramowanie dostępne jest dla systemów Windows i Linux, dla platform PC, Raspberry i Arduino.
Pełen kod źródłowy oprogramowania dostępny jest na GitHub-ie.
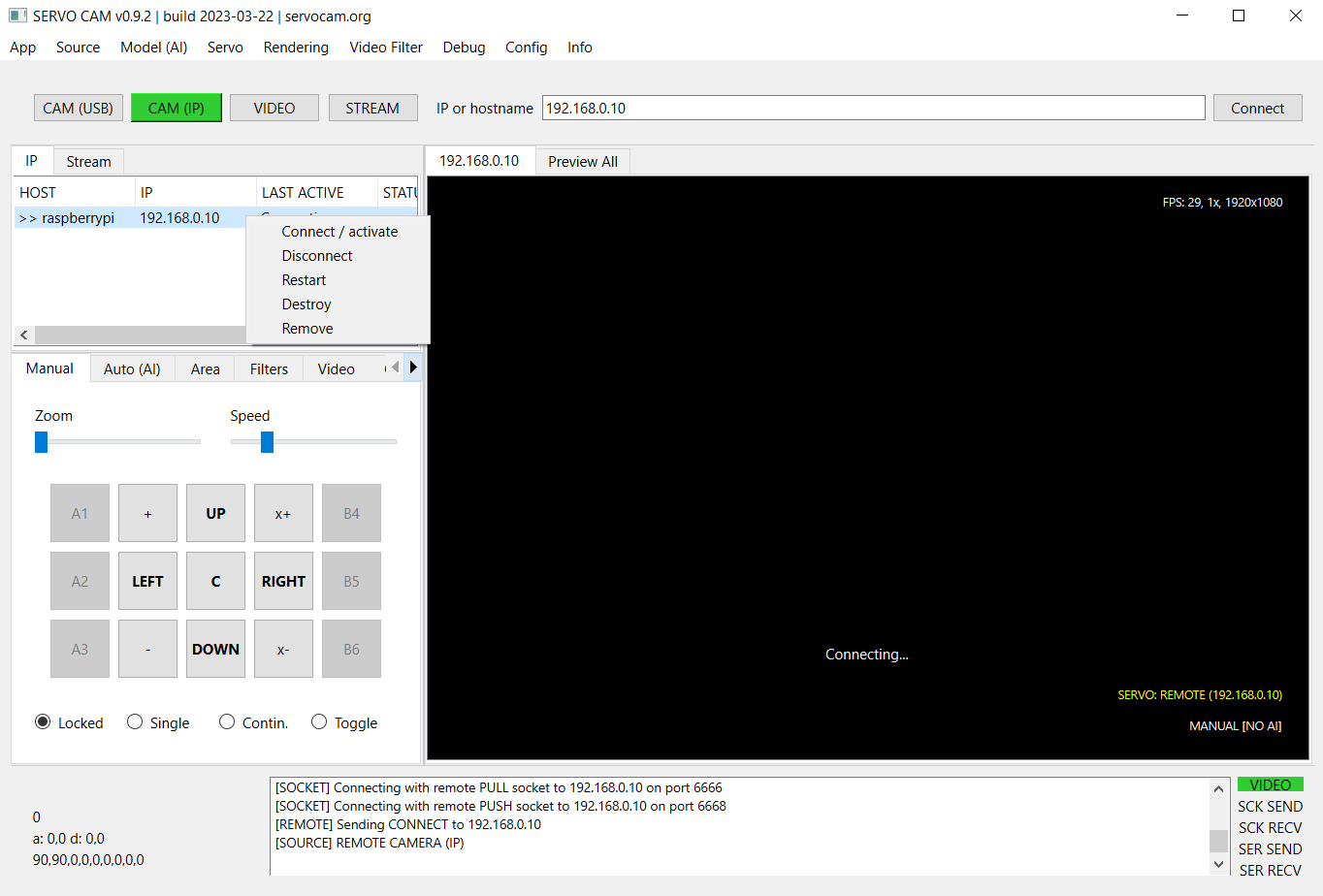
Zrzut ekranu z aplikacji sterującej (Windows 10):
MASZ PYTANIE LUB CHCESZ WESPRZEĆ PROJEKT?
Kontakt